
Améliorations logicielles majeures pour le robot Baxter
Rethink Robotics, le fabriquant du robot collaboratif Baxter vient d’annoncer coup sur coup les nouvelles versions des logiciels « manufacturing » et « SDK » pour Baxter.
Baxter existe en deux exemplaires : la version manufacturing dédiée aux professionnels et qui utilise un logiciel où toute la programmation se fait par démonstration en prenant le bras de Baxter et en utilisant les boutons qui sont sur celui-ci et la version recherche et éducation où la programmation s’effectue à l’aide d’un
SDK ROS
(Robot Operating System) à partir d’un PC connecté à Baxter. Ces deux versions de Baxter partagent strictement le même hardware.
Le SDK ROS 1.0 pour le Baxter recherche et éducation
Passer de la version 0.7 à la version 1.0 du SDK Baxter indique bien à quel point cette release est une release majeure. Largement utilisé par les laboratoires universitaires ou les bien les centres de recherche privés, la version recherche et éducation du robot Baxter permet de réaliser des programmes de R&D autour de la robotique collaborative. Mais qu’apporte cette nouvelle version du SDK ROS pour Baxter? Les principales évolutions sont les suivantes:
- Accès au PC embarqué du robot par SSH permettant ainsi de faire tourner du code ROS en local sur le robot. Cette évolution est sans doute la plus attendue par la communauté. Elle améliore les performances du robot de manière significative.
-
Compatibilité complète avec les outils et librairies à succès de ROS : le simulateur Gazebo, Rviz et bien-sûr la librairie MoveIt!. Cette compatibilité complète du robot va améliorer encore le partage de code et de compétence entre les utilisateurs de la communauté.

-
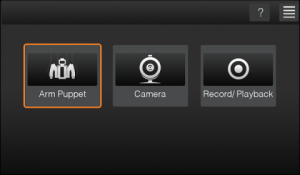
Démarrage de Baxter en mode Démo pour effectuer facilement des démonstrations de Baxter. Vous aurez accès dans ce mode à la possibilité de présenter toutes les fonctionnalités du robot Baxter grâce à une interface pilotage depuis les boutons positionnés sur les bras de Baxter. Les exemples déjà présents sont le mode « Puppet » où
le mouvement que vous donnez à un bras est automatiquement répliqué par l’autre bras, le mode caméra où le retour caméra est affiché sur l’écran de Baxter et enfin le mode « record/playback » ou vous pouvez enregistrer des mouvements de bras de Baxter en déplaçant manuellement ceux-ci et en demandant à Baxter ensuite de répéter ces mouvements.
- Accès à un menu pour graphique pour lancer la calibration de Baxter
- Un nouveau programme d’enregistrement de « Waypoints », c’est à dire de positions des bras dans l’espace.
- De nouvelles options de configuration avancée pour le réseau afin de vous permettre de mieux intégrer Baxter dans le réseau de l’entreprise.
- Enfin, de nombreuses améliorations dans la précision et la planification des mouvements ont été effectuées dans cette nouvelle release, rendant ainsi Baxter plus performant et plus efficace. Les utilisateurs du SDK auront par ailleurs plus de fonctionnalités et d’options à leur disposition afin de concevoir du code plus précis, évolutif et adapté aux besoins.


Intera 2.1, la nouvelle version du logiciel de production pour Baxter
Intera est désormais le nouveau nom du logiciel de production installé sur Baxter. Intera est la pierre angulaire de l’offre de Rethink Robotics puisque c’est grâce à Intera que la robotique collaborative est rendue possible : il permet à l’opérateur d’interagir de manière intuitive avec Baxter, sans compétence particulière en informatique ou en robotique, afin d’apprendre à Baxter les gestes à réaliser. Autant dire que ce type de logiciel de production robotique est une révolution dans la robotique industrielle où jusqu’alors l’aspect collaboratif entre l’homme et la machine n’avait pas été exploré.
La version 2.1 d’Intera propose de nouvelles fonctionnalités mais aussi des améliorations significatives de performances. En effet, les performances en vitesse et en précision du robot Baxter lui permettent d’effectuer la même tâche en deux fois moins de temps qu’avec les version précédentes d’Intera.
En termes d’améliorations fonctionnelles, on pourra citer la possibilité laissé à l’opérateur de choisir le poids respectif de la vitesse vis à vis de la précision du mouvement lorsqu’il apprend une tâche à baxter.

De même, une fonction « coup de pouce » permet à l’utilisateur d’ajuster manuellement des opérations de pick and place grâce à une nouvelle interface menu. Enfin, une fonction de sécurité permettant de restreindre l’accès à l’interface d’apprentissage de Baxter aux utilisateur autorisés grâce à une clé USB spécifique.