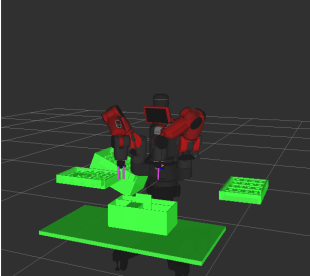
Baxter Tasker est un nouveau package ROS créé par Génération Robots pour le fameux robot Baxter Research de Rethink Robotics.
Baxter Tasker offre une interface pour contrôler votre ordinateur et le robot Baxter, créé pour mettre en place un comportement de « pick and place », et qui génère automatiquement du code Python pour ce dernier.
Ainsi vous pouvez apprendre au robot des comportements simples à votre robot Baxter et vous pouvez également créer des comportements plus complexes en Python.
Baxter Tasker: Faciliter le « Pick and place » pour Baxter
Vue d’ensemble de Baxter Tasker
Que vous soyez un développeur Python nouveau ou plus expérimenté, vous trouverez le package ROS utile pour démarrer avec le robot Baxter. Il s’agit là d’un moyen rapide pour apprendre à programmer Baxter.
Vous vous demandez sans doute de quoi est capable le robot Baxter, ce que vous découvrirez très vite grâce aux classes disponibles en Python qui affichent les données des capteurs et les éléments de contrôle du robot.
Au travers de cette interface vous aurez accès aux éléments suivants:
- l’affichage
- les boutons
- les caméras
- les bras
- les capteurs infrarouge de distance
- les leds
- les capteurs à ultrasons

Pour vous offrir un contrôle plus poussé du matériel du robot, vous pouvez également créer des classes où vous pouvez ajouter de nouvelles fonctions qui sont automatiquement visibles sur l’interface graphique de l’utilisateur. Des processus sont aussi disponibles pour sauvegarder les trajectoires et les informations de son environnement.
{kind=link}
Baxter Tasker: De quoi ai-je besoin et quels logiciels sont-ils requis?
Le Baxter Tasker a été conçu pour Python 2.7 avec ROS Groovy et le SDK 0.7.0 de Baxter. Nous vous recommandons d’installer également MoveIt, un outil pour créer une scène virtuelle autour de Baxter pour une planification sans collision.
Pour commencer, envoyez nous tout simplement un clé SSH publique à baxter@humarobotics.com et télécharger Baxter Tasker gratuitement sur notre serveur git: git clone git@www.humarobotics.com:baxter_tasker.
Robots disponibles sur le site de Génération Robots: