
Nous avons fait plusieurs tests en intérieur et en extérieur avec le LiDAR RS-LiDAR16 de Robosense . Nous comparons les résultats avec ceux d’autres LiDAR (Quanergy M8-1, Sick 551 et RpLiDAR A3), obtenus dans les mêmes conditions.
La mesure de distance obtenue avec un LiDAR peut être influencée par des facteurs, ainsi que des sources internes (composants matériels, calculs mathématiques, protocoles de communication, etc.) ou externes (lumière du soleil, température, humidité, taille de l’environnement, matériaux et angles d’incidence, obstacles, etc.
Afin de comprendre l’influence de ces paramètres sur la précision des mesures de distance, nous avons mis en place et analysé différents environnements. Voici une liste de différents biais d’hypothèses sur les LiDAR :
| Biais | Testé | Détails |
| Matériaux de l’obstacle | Oui | Dix matériaux différents |
| Lumière du soleil | Oui | Quatre environnements (obscurité, lumière artificielle, à l’ombre et sous la lumière du soleil) |
| Déviance en fonction du temps | Oui | Deux environnements avec 45 minutes de test chacun |
| Température | Oui | Deux environnements : à l’ombre et sous le soleil |
| Humidité | Non | |
| Angle incidence | Non | |
| Composants Hardware | Non | Tests effectués sur les mêmes LiDAR |
| Protocoles de communication | Non | Ethernet et USB selon les spécifications |
| Calculs Mathématiques | Non | Lecture de la valeur brute du nuage de points/balayage laser |
| Différences entre faisceaux | Oui | Avec obstacles verticaux |
| Influences fréquence de balayage | Oui | A 5, 10 et 20 Hz |
| Différences des courtes/longues distances | Oui | 6 distances différentes |
| Différences entre deux plages angulaires | Oui | Phase à 0° et +90°, +180° et +270°. |
| Obstacle continu/discontinu | Observé | Environnements supplémentaires, mais pas rapportés avec le même processus |
| Formes Circulaires/perpendiculaires | Observé | Environnements supplémentaires, mais pas rapportés avec le même processus |
Il s’agit d’un test très complet, nous avons essayé de couvrir les différents biais. Les résultats peuvent ne pas correspondre à ceux qui ont été fait avec une répétabilité élevée, mais cela donne une bonne idée des performances du RS-LiDAR16.
Plusieurs tests ont mis en évidence des erreurs supérieures (entre 0 et 4 cm) pour RS-LiDAR16 par rapport aux autres LiDAR en général. Cependant, il est bon de rappeler que le LiDAR RoboSense a 16 faisceaux et dans les applications cartographiques, le déplacement permet de corriger ces erreurs par itérations.
Les LiDAR 3D : temps réel, grande portée et grande précision
Aujourd’hui, les LiDAR et plus particulièrement les LiDAR 3D sont largement utilisés dans les nouvelles technologies comme la robotique mobile et la navigation autonome. En effet, ils sont essentiels à la prise de décision pour naviguer.
Les dernières améliorations technologiques permettent d’obtenir tous les détails d’un environnement, d’un segment et d’un faisceau d’obstacles.
Plusieurs entreprises développent leurs propres composants et logiciels de cartographie. Ils fournissent des informations 3D sur leur environnement en temps réel, sans contact, à grande portée et avec une grande précision de mesure.
Il existe deux méthodes (directe et indirecte) de technologies de temps de vol[2] :
- La méthode directe, basée sur la mesure de l’intervalle de temps entre un signal émis et un signal détecté.
- La méthode indirecte, où la distance est obtenue en utilisant un déphasage d’une lumière modulée avec un signal sinusoïdal ou un signal pulsé.
Les applications exigent un haut niveau de précision, la plage de distance, la résolution et la précision du capteur sont les principaux paramètres de mise au point.
Présentation du Lidar RS-LiDAR16
Le RoboSense RS-LiDAR16 est un modèle de LIDAR 3D attrayant et moins cher que ses concurrents .
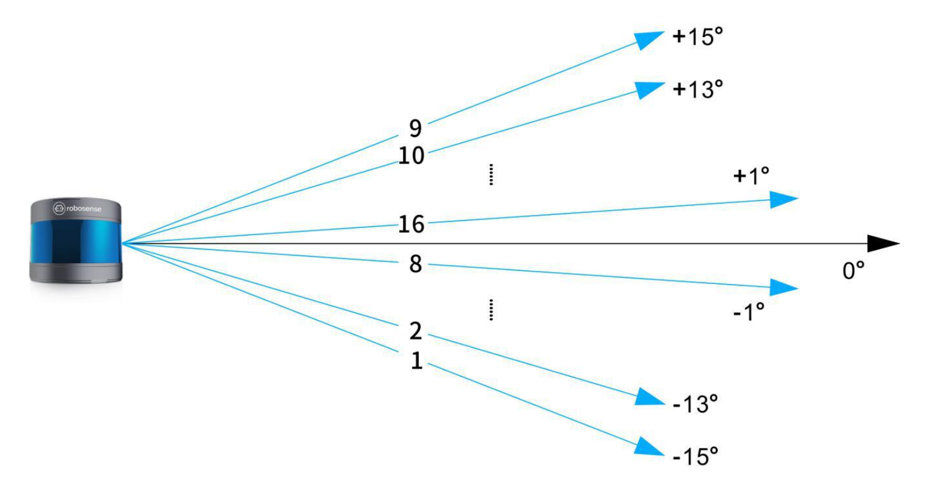
Il a de bonnes spécifications pour un prix de 4 128,00€ TTC. Le RS-LiDAR16 dispose de 16 faisceaux laser. Le système se compose de 16 scanners linéaires 2D qui peuvent tourner à une fréquence choisie entre 5Hz et 20Hz. Les 16 faisceaux sont répartis sur un champ de vision vertical (FOV) de 30° et l’ensemble de l’unité tourne pour donner un champ de 360°.
Vous trouverez ci-dessous les spécifications techniques du LiDAR Robosense RS-LiDAR16 :
- Compatible ROS
- Faisceaux laser : 16
- Longueur d’onde : 905 nm
- Classe de laser : 1
- Précision : ± 2 cm
- Plage de détection : 20 cm à 150 m (20 % de réflectivité)
- Débit de données : 320 000 pts/s
- Champ de vision (vertical) : +15° à -15° (30°)
- Résolution angulaire (verticale) : 2°
- Champ de vision (horizontal) : 360°
- Résolution angulaire (horizontale/azimut) : 0,09° à 0,36° (5-20 Hz)
- Vitesse de rotation : 300 à 1200 rpm (5-20 Hz)
- Tension d’alimentation : 9-32 Vcc
- Consommation : 9 W
- Protection : IP67
- Température de fonctionnement : -10 à 60°C
- Type de données : coordonnées spatiales/intensité
- Dimensions : 82,7 mm (H) x 109 mm (φ)
- Poids : 840 g (sans câbles)
Pour permettre l’utilisation du capteur, RoboSense fournit un logiciel pour lire les valeurs sous Windows et Ubuntu et un SDK pour utiliser le LiDAR sous ROS .
Caractérisation du LiDAR 16 faisceaux de Robosense
Comme indiqué dans le premier tableau, les erreurs de mesure peuvent avoir différentes sources. Dans cette partie, nous tentons d’évaluer les erreurs dues à la conception du système et à l’environnement.
Lors du post-traitement, nous nous concentrons principalement sur les faisceaux centraux (8 & 16) :
1. Influences des matériaux des obstacles
Les performances des LiDAR dépendaient du matériau de l’obstacle. Afin de quantifier ces différences, nous considérons une scène statique, le RS-LiDAR16 se positionne devant un obstacle matériel différent, à une distance d’environ 2m ± 0,01m.
Pour chaque matériau, le LiDAR est lancé dans un environnement intérieur après au moins 2 minutes de non-utilisation pour une durée 3 minutes. Un bag de 30 secondes est enregistré pour les données post-traitement.
Dix matériaux ont été testés : fenêtre, écran TV (verre), tableau blanc, porte, mousse, plastique de transport, boîte en carton, métal, mur, bois condensé.
2. Influence de la lumière du soleil
Certains LiDAR ne fonctionnent pas correct à l’extérieur, en raison de l’influence de la lumière du soleil. En effet, le soleil émet de la lumière sur une large gamme de longueurs d’onde qui altère la mesure LiDAR.
En considérant une scène statique, le RS-LiDAR16 se positionne devant un mur plan ( bois condensé ), à une distance d’environ 2m ± 0,01m . Pour chaque environnement, le LiDAR est lancé après au moins 2 minutes de non-utilisation pour une durée de 3 minutes. Un bag de 30 secondes est enregistré pour les données post-traitement.
Quatre environnements ont été testés: intérieur dans l’obscurité totale, intérieur avec lampes artificielles, extérieur à l’ombre et extérieur sous le soleil.
3. Influences du temps de fonctionnement et de la température
Certains composants voient leur précision réduite sur une longue période de fonctionnement et surtout lorsque la température est plus élevée.
En considérant une scène statique, le RS-LiDAR16 se positionne devant un mur plan ( bois condensé ), à une distance d’environ 2m ± 0,01m . Pour chaque environnement, le LiDAR est lancé après au moins 10 minutes de non-utilisation pendant 45 minutes. Toutes les 10 minutes, un bag de 1 minute est enregistré pour le post-traitement des données.
Deux environnements ont été testés: a l’extérieur à l’ombre (température ambiante ~ 25°C) et au soleil (température de contact ~ 32°C).
4. Différences entre faisceaux & Influence de la fréquence de balayage & courtes et longues distances
Les LiDAR 3D, doivent prendre en compte le comportement physique des ondes lumineuses. En raison des écarts d’angle des faisceaux verticaux, le laser n’aura pas les mêmes résultats.
Avec une fréquence de balayage de 20 Hz, le moteur LiDAR tourne à une vitesse double que pour 10 Hz. Il est intéressant de tester si les résultats sont affectés.
Enfin, les LiDAR ayant une longue portée ne sont pas vraiment bons sur courte distance. Nous voulons quantifier ces différences d’erreurs.
Première scène
En considérant une scène statique, les RS-LiDAR16, Quanergy M8, RPLIDAR A3 et Sick 551 se positionnent devant un mur plan ( boîtes en carton ), à une distance d’environ 1,01m et 1,90m avec ± 0,01m .
Pour chaque environnement, le LiDAR est lancé après au moins 2 minutes de non-utilisation pendant 3 minutes. Un bag de 15 secondes est enregistré pour les données post-traitement.
Deuxième scène
En considérant une scène statique, le RS-LiDAR16 et le Quanergy M8 se positionnent devant un mur plan ( bois condensé ), à une distance d’environ 5,00m, 9,98m, 19,97m et 27,81m à ± 0,01m .
Pour chaque environnement, le LiDAR est lancé après au moins 2 minutes de non-utilisation pendant 3 minutes. Un bag de 30 secondes est enregistré pour les données post-traitement.
5. Différences entre les zones angulaires de mesure du LiDAR
Le LiDAR peut avoir des performances inférieures sur une partie de la plage angulaire.
En considérant une scène statique, le RS-LiDAR16 se positionne devant une paroi plane ( boîtes en carton ), à une distance d’environ 1,01m ± 0,01m .
Pour chaque environnement, le LiDAR est lancé après au moins 2 minutes de non-utilisation pendant 3 minutes. Un bag de 15 secondes est enregistré pour les données post-traitement.
Quatre environnements ont été testés : l’environnement ne change pas, le LiDAR tourne de 90° entre les deux enregistrements, +180° et +270°.
Détails de l’algorithme
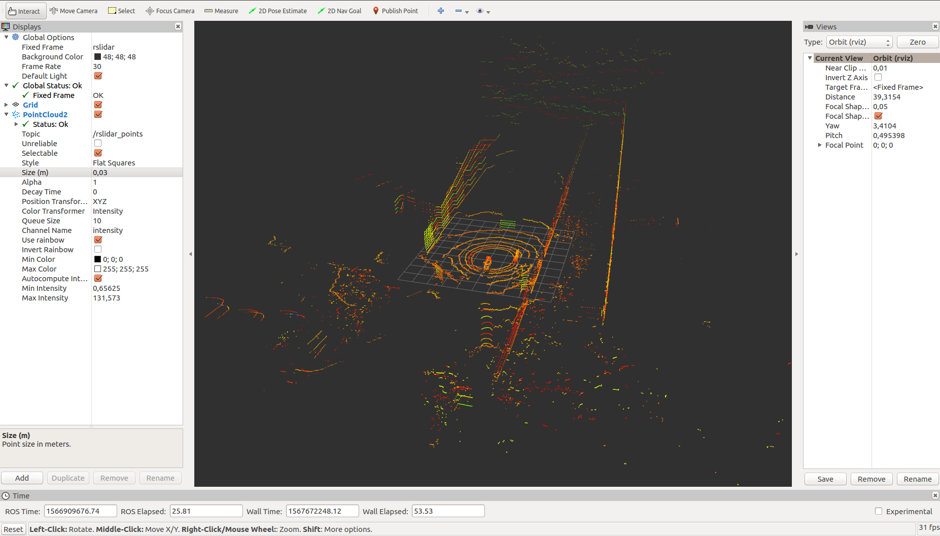
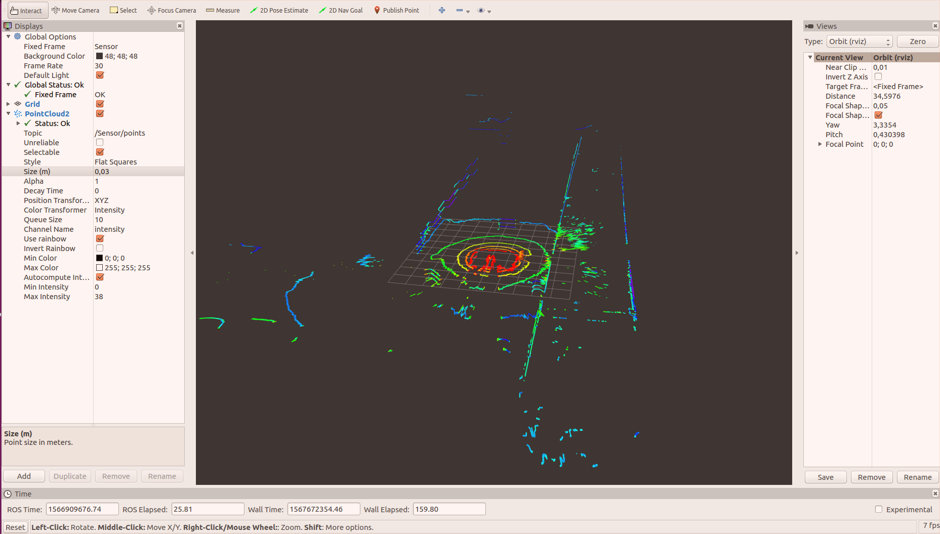
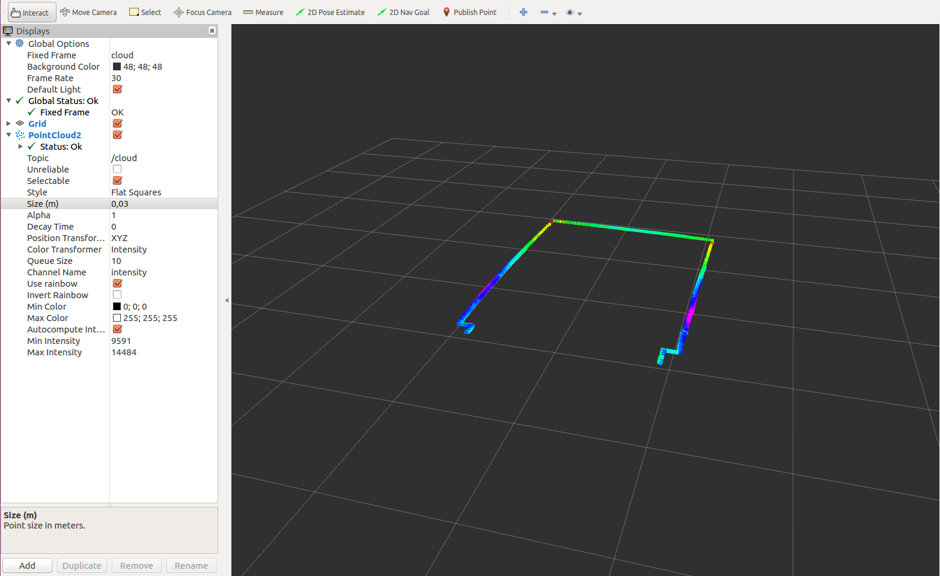
L’algorithme utilisé n’est pas compliqué, le RS-LiDAR16 lit les données brutes à travers le topic du LiDAR qui transmet les messages de type Pointcloud2 pour les LiDAR RS-LiDAR16, Quanergy M8 et Sick et de type Laserscan pour le RpLiDAR.
Pour ces expériences, seules les données des axes X et Y sont calculées pour obtenir la moyenne, l’étendue, l’écart-type et la variance des données des bags. Nous sommes dans une zone restreinte (X +/- 0,1m et Y +/- 0,5m), où X et Y correspondent aux coordonnées connues de l’obstacle.
Sur l’ensemble de données, nous comptons combien de valeurs sont détectées par le LiDAR , ce qui permet de mettre en perspective le résultat obtenue.
Nous calculons les valeurs sur tout le bag puisque l’environnement ne change pas pour obtenir des résultats plus précis.
Résultats expérimentaux
Maintenant que vous connaissez les conditions des tests de la partie III, nous pouvons discuter et interpréter les résultats. Notez que les résultats complets sont disponibles dans ce document Résultats des tests faits sur le LiDAR Robosense RS-LIDAR16 .
1. Influences des matériaux des obstacles
Le RS-LiDAR16 a de résultats bons (± 1cm) avec écran de télévision, tableau blanc, porte et mousse mais a des données relativement étalées avec un écart type de ±2cm.
En ce qui concerne l’obstacle de la fenêtre, seulement 4 valeurs sont détectées car les obstacles transparents sont les plus difficiles à mesurer par LiDAR.
Enfin, de manière inattendue, les boîtes en carton, le mur, le bois condensé et le fer ont des résultats moins bons avec une précision de +4cm et +7cm avec un écart type faible (± 1,5cm).
Ce test montre que la différence entre les matériaux peut être importante et inattendue. Pour être sûr, de nouveaux tests devraient être effectués sur les matériaux qui conduisent à de moins bons résultats.
Pour les autres tests, il faut garder à l’esprit le matériau choisi.
2. Influence de la lumière du soleil
Ce test a été effectué sur un obstacle en bois condensé, le RS-LiDAR16 semble avoir de meilleurs résultats (-3cm) en intérieur qu’en extérieur (+5cm à l’ombre et +7cm au soleil).
Avec le même matériau, la différence entre les environnements est assez importante.
3. Influences du temps de fonctionnement et de la température
Ce test est réalisé avec un obstacle en bois condensé, à l’ombre, le RS-LiDAR16 ne semble pas avoir de dérive temporelle mais au contraire, il devient plus précis dans le temps. En effet, les premières mesures ont des erreurs plus importantes (+5cm à 0min contre +1cm à 45min pour le faisceau 8).
Sous le soleil, les faisceaux étudiés sont le 6 & 7 car il y a un offset sur le plan horizontal (ils correspondent donc aux 8 & 16 de la scène précédente), le comportement est le même, mais l’erreur converge autour de +5cm. Il pourrait s’agir des conséquences de l’influence de la température. En effet, le LiDAR était plus chaud au touché qu’à l’ombre.
Tant à l’ombre que sous le soleil, les rayons 16 et 7, possèdent des erreurs supérieures (+3cm and +2cm).
4. Différences entre faisceaux & Influence de la fréquence de balayage & courtes et longues distances
Tout d’abord, à l’intérieur, sur de courtes distances (1,01m) les LiDAR 2D ont de meilleurs résultats (rpLiDAR : 0cm et Sick : +1cm) grâce à leur faisceau parfaitement horizontal.
A propos des LiDAR 3D, le Quanergy a +0cm et le RS-LiDAR16 a, avec moins d’écart-type, +3cm d’erreur en moyenne sur les faisceaux.
Pour une distance de 1,90m, les capteurs 2D ont encore de bons résultats (rpLiDAR : 0cm et Sick : +2cm).
A propos des LiDAR 3D, Quanergy et RS-LiDAR16 ont en moyenne +1cm d’erreur sur les faisceaux.
Ensuite, pour l’environnement extérieur, la précision est meilleure pour une fréquence de 10Hz (-1cm d’erreur que pour 20Hz). Notez qu’une fréquence de balayage de 5Hz est dangereuse pour les robots mobiles car pas assez rapide concernant les changements de l’environnement.
Ensuite, pour 5.00m de distance, la précision est meilleure sur les faisceaux centraux. Sur ces faisceaux (8 & 16), le RS-LiDAR16 a +1 cm d’erreur et d’écart-type +2cm.
Pour une distance de 9,98 m, le Quanergy est plus précis avec seulement +1 cm d’erreur pour les deux fréquences et +3 cm à 10 Hz ; +5 cm à 20 Hz pour le RS-LiDAR16.
Pour 19,97m, les deux ont une erreur de +3cm.
Enfin sur une distance de 27,81m, tous deux sont précis avec +1cm pour le RS-LiDAR et +2cm pour le Quanergy.
En raison de la résolution, le RS-LiDAR16 a peu de valeurs à cette distance sur un si petit obstacle (1,20m x 0.8m). A 20Hz, il ne détecte aucun point.
5. Différences entre les zones angulaires de mesure du LiDAR
Les résultats sont assez similaires mais présentent quelques petites différences (± 1 cm d’erreur et ± 0,5 cm d’écart-type).
Les conditions de test ne nous permettent pas de conclure sur un comportement type. L’expérience doit être faite plusieurs fois avec différents environnements.
Un point peut être noté, les mesures semblent volatiles, l’erreur est aléatoire et non systématique.
6. Conclusion de cette étude expérimentale
Le but de cet article était d’étudier les performances du capteur RS-LiDAR16 à travers une série de tests. Ce capteur est un nouveau LiDAR sur le marché. Notre étude a été conçue pour évaluer les mesures fournies afin de déterminer s’il était possible de l’utiliser dans les applications couvertes par le fabricant.
Les expériences auraient dû être faites plusieurs reprises pour obtenir plus d’échantillons et dans des environnements différents (autres formes d’obstacles et distances), mais cela donne toujours un bon aperçu des performances du RoboSense RS-LiDAR16.
Plusieurs tests ont mis en évidence des erreurs supérieures pour RS-LiDAR16 par rapport aux autres LiDAR en général. En ce qui concerne le LiDAR 2D, il est logique d’obtenir une plus grande précision en raison du nombre de faisceaux.
Par rapport à la Quanergy M8-1, il est bon de rappeler que RoboSense a 16 faisceaux et dans les applications cartographiques, se déplacer permet de corriger ces erreurs par itérations.
Encore une fois, il est important de se rappeler que le capteur reçu est l’un des tout premiers livrés. Nous espérons que les prochaines versions corrigeront les erreurs rencontrées. En conséquence, l’arrivée de ce capteur peut être considérée comme une ouverture pour une distribution plus large de ce type de capteur.
Enfin, c’est notre premier vrai test, nous avons essayé de couvrir différents biais, les résultats peuvent ne pas correspondre à ceux trouvés avec la répétabilité mais cela vous donne une bonne idée des performances RS-LiDAR16.
Annexes et références de l’étude
Cet article n’a pas pour but d’être validé en tant que document de recherche. Étude inspirée de l’étude du Quanergy M8[1].
[1] Mittet, A., Nouira, H., Roynard, X., Goulette, F. and Deschaud, J-E. “EXPERIMENTAL ASSESSMENT OF THE QUANERGY M8 LIDAR SENSOR”, The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLI-B5, 2016 XXIII ISPRS Congress, 12–19 July 2016, Prague, Czech Republic
[2] Kilpela, A., Pennala, R. and Kostamovaara, J. “Precise pulsed time-of-flight laser range finder for industrial distance measurements”, Review of Scientific Instruments72(4), pp. 2197–2202, 2001.
Consultez notre section LiDAR pour la recherche et le supérieur ou contactez-nous pour avoir plus d’informations ou obtenir un devis.
Les marques de LiDAR distribuées par Génération Robots

|
|
|
|
|
|
|