
Le module Python cozmo.objects et la gestion des cubes de Cozmo
Dans ce TP pour Cozmo SDK, nous abordons la gestion des Power Cubes de Cozmo. Ces cubes ajoutent une couche d’interaction supplémentaire entre le robot et son environnement, mais aussi avec les humains. Cozmo se sert également de ces cubes pour cartographier son environnement.
Détection d’objets
Les Power Cubes(LightCube dans le SDK) sont des objets (
cozmo.objects
) pouvant être reconnus et détectés par Cozmo (détection via la caméra de Cozmo ou par détection d’un changement de valeur dans les cubes, quand on les tapote).
Cozmo peut reconnaître d’autres choses que ses cubes grâce à sa caméra, il suffit d’attacher des marqueurs personnalisés sur ces nouveaux objets pour les distinguer. Voici un exemple de marqueur ci-dessous :
Il est aussi possible de créer des éléments virtuels dans le monde de Cozmo. Ce sera l’objet d’un autre tutoriel.
Fonctionnement des cubes
Les Power Cubes de Cozmo embarquent un accéléromètre, un module BlueTooth et 4 LEDs. Cozmo peut reconnaître ses cubes (vision) mais aussi détecter quand ils sont déplacés ou tapotés.
Dans ce TP, vous allez apprendre à utiliser les 4 fonctionnalités suivantes :
- Détecter les cubes
- Allumer les LEDs
- Déterminer la position des cubes
- Détecter le tapotement sur un cube
Objectif : détecter des objets et interagir avec
- Durée : 45 minutes
- Niveau de difficulté : intermédiaire
- Compétence acquises : détection des cubes et communication entre Cozmo et ses cubes
Les prérequis
Vous devez avoir acquis les notions abordées dans les tutoriels ci-dessous
- Cozmo SDK : comment activer le mode SDK de Cozmo
- Cozmo SDK : les behaviors cozmo.behavior.BehaviorTypes (en construction)
Par ailleurs vous devrez importer certains éléments de la librairie Cozmo tel que ci-dessous :
Les nouvelles notions que vous allez aborder dans ce TP
- La fonction cozmo.object
Détection des cubes
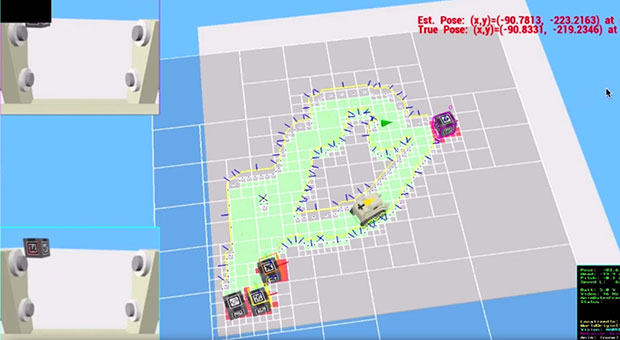
Les cubes seront détectés par la caméra embarquée de Cozmo. Cette détection visuelle permet de positionner le cube dans le référentiel du robot.
Parcours de l’environnement
Le robot Cozmo embarque des behaviors qui se chargent de scanner l’environnement autour de lui pour détecter les objets présents, comme ses cubes. Le robot se déplace et scanne l’environnement grâce à sa camera embarquée.
LookAroundInPlace est l’un de ces behaviors .
Fonctions de détection des cubes
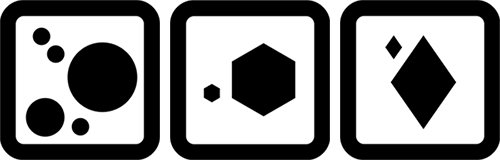
Lorsque Cozmo se déplace dans son environnement, il cherche à détecter de nouveaux objets (grâce aux marqueurs visuels se trouvant sur les différentes faces de l’objet).
Le cube 1 dispose d’une image qui ressemble à un trombone, le cube 2 ressemble à une lampe ou à un cœur et le cube 3 ressemble à un bébé dans son siège.

Deux fonctions peuvent lancer la recherche de ces marqueurs :
- robot.world.wait_until_observe_num_objects(…)
- robot.world.wait_for_observed_light_cube(…)
wait_until_observe_num_objects prend en argument les nombre d’objets à détecter et le type d’objets ainsi qu’un timeout si la recherche n’aboutit pas. Il retourne une liste d’objets.
Dans l’exemple ci-dessus, 3 objets de type cozmo.objects.LightCube sont recherchés.
wait_for_observed_light_cube permet de scanner l’environnement à la recherche d’un cube. La recherche s’interrompt au premier cube trouvé. La fonction prend un paramètre timeout si la recherche n’aboutit pas. Elle retourne une instance de l’objet s’il est vu par Cozmo.
Cette étape est indispensable si vous souhaitez déplacer des cubes, les pousser, les empiler afin qu’ils soient présents dans le monde World du robot.
Allumage et extinction des LEDs des cubes
L’objet cozmo.objects.LightCube
Avant d’allumer un cube, il faut d’abord le sélectionner. Un cube est accessible par son id grâce à la fonction
get_light_cube
(
cube_id
)
Le
cube_id
est une valeur parmi
LightCube1Id
,
LightCube2Id
et
LightCube3Id
La fonction retourne un objet
cozmo.objects.LightCube
L’objet cozmo.lights.Light object
Il existe une infinité de couleurs mais 4 sont prédéfinies et facilement utilisables grâce à la fonction set_lights de l’objet LighCube .
Ces couleurs sont rouge, bleu, vert et blanc, vous pouvez y accéder via l’objet cozmo.lights.red_light, cozmo.lights.green_light, cozmo.lights.blue_light, cozmo.lights.white_light.
Il est aussi possible de passer des valeurs numériques.
Voici un exemple complet permettant de manipuler les LEDs des cubes lumineux de Cozmo.
Récupération des coordonnées des cubes
Un cube détecté par Cozmo renvoie les coordonnées de sa position. La position d’un cube qui n’est pas positionné dans le monde de Cozmo aura pour coordonnées (0, 0, 0).
Un objet dispose d’une variable de type Pose . L’objet Pose contient lui même un objet de type Position qui contient les coordonnées x, y et z de l’objet.
Pour afficher les coordonnées du cube 1 on peut utiliser le code suivant :
On peut également récupérer les coordonnées dans un tuple (x, y, z).
Détection d’un tapotement sur le cube
Les cubes disposent d’un accéléromètre, qui renvoie ses valeurs au robots Cozmo via Bluetooth. Cozmo peut donc « sentir » quand quelqu’un tapote sur un de ces cubes.
Lorsque cela se produit, un événement
cozmo.objects.EvtObject
Tapped
est émis.
Voici comment le récupérer un événement et le traitement par une fonction callback :