Le robot collaboratif Baxter de Rethink Robotics semble être assez adroit pour brancher une prise USB. C’est le constat fait par les chercheurs du MIT et de la Northeastern University, qui sont parvenus à équiper l’une des pinces du préhenseur du cobot Baxter d’un capteur tactile qui lui permet d’attraper un câble USB et l’insérer dans un port USB.
Un capteur tactile pour améliorer les préhenseurs du robot Baxter
Pour ce faire les chercheurs du célèbre institut de recherche MIT et de la Northeastern University ont équipé le robot Baxter avec un nouveau capteur tactile, GelSight, développé
également par le MIT et dévoilé la première fois en 2009. Ce capteur tactile n’est pas aussi sensible que l’original qui fut développé afin de saisir des détails à l’échelle du micromètre. Il est aussi d’une taille plus petite, assez pour pouvoir tenir sur le préhenseur du robot Baxter.
Un robot collaboratif tel que Baxter est capable d’une précision remarquable lorsque les objets qu’ils manipulent sont parfaitement positionnés au préalable. Selon Robert Platt, professeur assistant d’informatique à l’université de Northeastern et l’expert en robotique de cette équipe de recherche, parvenir à un un développement de la dextérité manuelle avec une précision aussi fine est inédite pour un robot tel que Baxter, qui se repère en mouvement.
Une méthode inspirée par la synesthésie
C’est en observant ses enfants et leur maniement des objets que l’idée est venue au professeur Adelson. Pour lui l’idée de pouvoir transformer cette stimulation digitale en une image qui puisse être facilement exploitée par un robot.
Là où la plupart des capteurs tactiles utilisent des mesures mécaniques pour estimer les forces mécaniques, GelSight utilise des algorithmes de traitement d’image et de vision par ordinateur.
Un capteur GelSight – à la fois l’original et la nouvelle version développée pour la robotique – consiste en un bloc de caoutchouc synthétique transparent recouvert d’une peinture
métallique sur le côté. Le caoutchouc se conforme à n’importe quel objet contre lequel il est pressé, et la peinture métallique unifie les propriétés réfléchissantes de matériel divers, facilitant les mesures optiques.
Dans le nouvel appareil, le gel est inséré dans un conteneur cubique en plastique avec uniquement la partie recouverte de peinture métallique exposée. Les quatre côtés du cube adjacents à la face émettrice du capteur sont translucides, et chacun transmet une couleur différente de lumière – rouge, verte, bleue ou blanche – émises par des diodes électroluminescentes montées à l’extrémité opposée du cube. Lorsque le gel est déformé, la lumière rebondit sur la peinture métallique et est capturée par une caméra montée sur le même côté du cube que les diodes.
L’explication en image ci-dessous:
Un capteur Plug-and-play
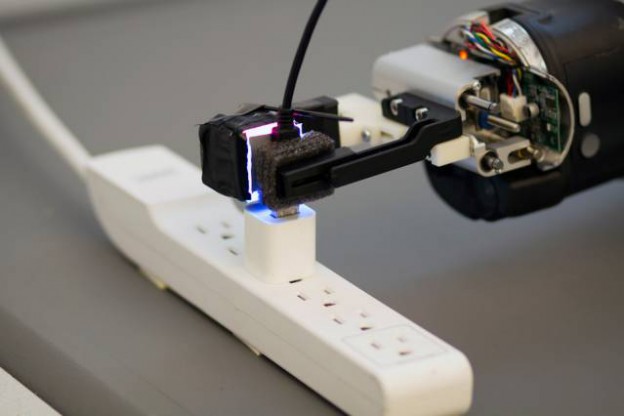
Dans cette expérience, un robot Baxter de la société Rethink Robotics, une société fondée par Rodney Brooks qui fut lui-même enseignant au MIT, a été équipé d’un préhenseur, dont l’une des pinces était équipée d’un senseur GelSight à son extrémité. En utilisant des algorithmes informatiques de vision artificielle conventionnels, le robot Baxter a identifié la prise USB en suspens et a tenté de l’attraper. Il a alors déterminé la position de la prise USB par rapport à ses préhenseurs grâce au symbole USB imprimé en relief. Bien qu’il y ait
eu une variation de 3 millimètres par rapport à l’endroit où le robot a saisi le connecteur, il était capable de mesurer sa position de manière assez précise pour l’insérer dans un port USB, avec une marge d’erreur d’un millimètre seulement.
Les roboticiens sont toujours à la recherche de nouveaux capteurs, et ce prototype parait assez prometteur pour devenir un accessoire pratique.