
XM430 Dynamixel Beta-test
New Dynamixel motors have been designed by Robotis: the XM430-210R and the XM430-350R. These ones are in the Beta-testing phase, but they seem to be promising! We had the opportunity to test them, and we are revealing to you our first impression here.
The XM430 servomotors can be considered as the new generation of the MX28 servomotors. As its predecessor, the XM430 are easy to use, efficient, accurate and offer a lot of features, without considering the novelties which allow much more features.
The mechanical appearance
The XM430 servomotors (on the right), with their aluminium case and their parallelepipedal shape, have a smoother look, and are a bit smaller than the MX28 (on the left).

First of all, concerning the assembly, the step is made easier thanks to threaded holes directly integrated in the case, that removes the nuts. Moreover, the wires are connected to the motor in a recess, then stucked by a cover, so that the bad contacts are avoided at the level of the connections, as we can see in the picture below.
That sounds like nothing, but for those who are used with Dynamixel servomotors, it is clearly an enjoyable improvement, well felt by Robotis.

If we were supposed to talk about a drawback concerning the XM430 motors,it would be this one : due to the position of the threaded holes compared to the MX28 ones, the robot structures must be readjusted to replace the old motors by the new ones.
Indeed, we noticed that the wholes are not exactly compatible with the Bioloid structure pieces (plastic pieces), but they remain adjustable to the metallic pieces for the Dynamixel. In any case, this little drawback remains not much meaningful compared to the new features offered by the MX430 Dynamixel, that we will develop in the next parts of this article.
Comparison with the MX Dynamixel
The power supply
The power supply is the same as for the MX versions, so in 12V. Consequently, the same power supply material can be used, that means the SMPS power supply and the SMPS. Concerning the consumption, the XM430 use about half less current than the MX Dynamixel (40mA instead of 100mA)! It is huge and extremely important when we know that performing and battery life are two of the main aims in robotic. We can also add that these motors seem to warm less than the MX serie.
Broad characteristics
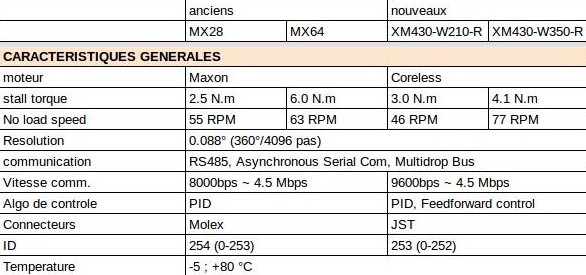
The broad features between the XM430 new generation and the MX one are compared in the above table. It particularly shows that the torque provided by the XM430 is higher than the MX28’s. We can notice that the maximum speed has been improved for the XM430-W350-R. We can easily conclude that, overall, with substantially the same characteristics, the new generation of motors have more power than the former generation.
Then, there is a question you might have : what is the type of communication of these motors ? Actually, both 1.0 and 2.0 protocols are supported by the XM430 Dynamixel. In other words, they can be integrated into a robot made of different versions of Dynamixel servomotors. As a reminder, the compatibility depends on the used protocol :
- 1.0 Protocol: AX, DX, RX, MX, EX series.
- 2.0 Protocol: XL-320, Dynamixel-PRO series.
Globally, the 2.0 protocol is an improved protocol, and allows to use 100% of the XM430 capacity. On the contrary, the 1.0 protocol prevent you to use some addresses of the new motors. In any way, regardless of the used protocol, programming the motor remains easy. To sum up, even the two protocos are suitable to the XM430, it is recommended to choose the 2.0 protocol. We can then figure out that all the next generation motors will use this protocol.
The new features
More feedback
As the MX series, the XM430 motors send back the same information like the position, the supply voltage or the temperature. However, new feedback are now available:
- time: tells you the exact time of the motor (at the measure moment for example)
- moving status: tells you if the motor is moving or not
- PWM: gives the used PWM percentage (Pulse Width Modulation). Note that the PWM appears in the Dynamixel servomotors!
- trajectory: gives the chosen trajectory for the movement. Here again, a new feature, the trajectory can be configured between to positions!
The two first feedback can, according to the use, turn out to be invaluable to know the motor at a precise time, and, for example, allows a better coordination between the motors and other features of your robot.
New control modes

Like the MX serie motors, the XM430 motors have the control in position and the control in speed. But other control modes have been integrated:
- PWM control: gives the control of the supply voltage average of the motor, that finally modulate the torque and the speed. This mode is useful for a wheeled robot. The PWM is often used in the R/C world, and a lot of control boards own this feature. The PWM finally appears with the XM serie.
- torque control: actually, is a current control. The motor applys the desired torque in continuous, and appears to be useful for a hand or a gripper. Here again, one, if not The one, feature expected by the roboticians.
- current-based position control: combine the position control and the torque control. This mode allows the motor to go to the desired position with a controled torque. It can be helpful for an articulated robot.
These new operating modes give much more possibilities to the motors, and so to the robots.
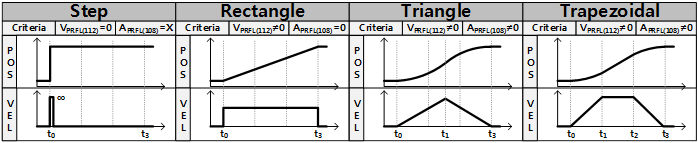
The trajectory control : the addition of the profiles
One of the main improvement (with the torque control) seems to be the addition of the profiles in acceleration and in speed, in order to define a trajectory between two positions. By playing with these two parameters, it is possible to give a curve to the movement trajectory, that finally gives a control on the movement. There are 4 types of trajectory, as you can see on the picture below.
5This control remains obviously limited to 4 trajectories, yet it offers the possibility to choose a type of movement. On the contrary, the old generation of Dynamixel MX-28 motor only allows you to configure the maximum reachable speed. According to the use, the choice of the trajectory profile can be primordial for a robot.
Conclusion on the Beta-test of the XM430 Dynamixel
The new generation of Dynamixel seems to be more effective, and especially holds new features.These allow to improve the robots, of any type it is: articulated, wheeled, gripper… We can also notice that these motors looks like they have been developed by taking into account the fiability; the motors seems to warm less que the MX series, and the poor contact must not occur anymore on the connectors. Finally, the ergonomics have been improved during the assembly thanks to the new design of these XM430 Dynamixel motors.
On the negative side, there is not so much to say. The first point concerns the mechanical adaptation on the existing robots to integrate the new motors. A point that is minor since they are not larger. The other point concerns the current measuring that is not functional. Indeed, we found out that a lot of noise appears in the measure we made.But this last point does not depreciate the XM430 compared to the MX28, since it has not current measurement system.
Application example: Poppy
We can imagine the integration of this new generation of Dynamixel in Poppy Humanoid, that could efficiently improve this open-source plateform: reduced consumption, new features… Indeed, the coordination between the movements could be improved, and also between the movements and some other features of Poppy like its eyes. Moreover, the new control of the movements could make Poppy more real.
As for Poppy, nowadays robots, especially those based on the MX Dynamixel, will have the possibility to evolve and finally acquire new features, and maybe new skills.