
Read our other blog posts from our “LiDAR technology” serie

|
Definition – What is a LiDAR ?
A LiDAR is an electronic component, and is part of the sensor family. More precisely, it is part of the Time Of Flight (ToF) sensor category. A sensor collects data about a physical parameter such as temperature, humidity, light, weight, distance, etc. A LiDAR is measuring the distance to the nearest obstacle through a communication protocol.
The LiDAR acronym means Light Detection and Ranging . This is a calculation method which allows to determine how far obstacles are from the sensor. A LiDAR uses a laser beam for detection analyzing and tracking purposes.

Physics – How does a LiDAR work?
LiDAR technology is a remote sensing technology that measures the distance between itself and a target . Light is emitted from the LiDAR and travels to a target. It will reflect off of its surface and comes back to its source. As the speed of light is a constant value, the LiDAR is able to calculate the distance to the target.
Distance = (Speed of Light x Time of Flight) / 2
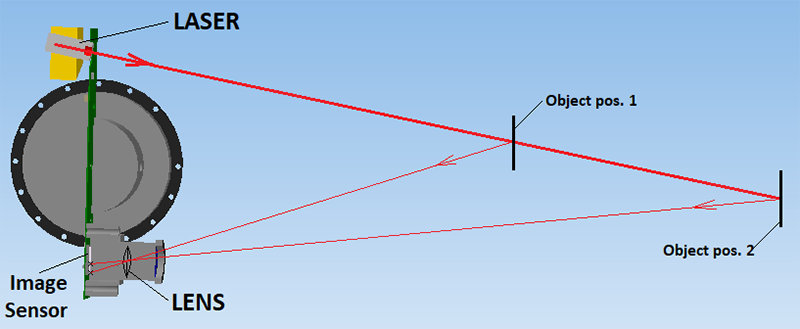
Knowing the position and orientation of the sensor, the XYZ coordinate of the reflective surface can be calculated , represented by a point .
By repeating this process many times, the instrument builds up a complex ‘map’ made up of all the points that the LiDAR collected.
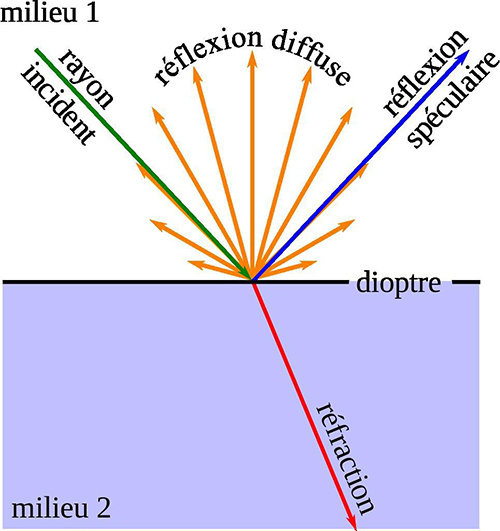
The following diagram explains how a wave is refracting on a surface.
Insight on LiDAR specifications
Scanning technology
Depending of the application, LiDAR can be either
single point-and-shoot
distance measurement or be built to run in scanning rotational mode.
In scanning mode, the LiDAR calculates
continuous values
depending of the pulsation frequency.
Scanning LiDAR typically
spin
and
measure
distance in an angular range up to 360° circle based on spinning frequency between 1Hz and 100Hz.
The LiDAR vision system
There are 3 categories of LiDAR vision systems:
1D, 2D
or
3D
. They work in the same way, the difference is about using a point and shoot or a scanning mode system, and also the quantity of laser beams used.
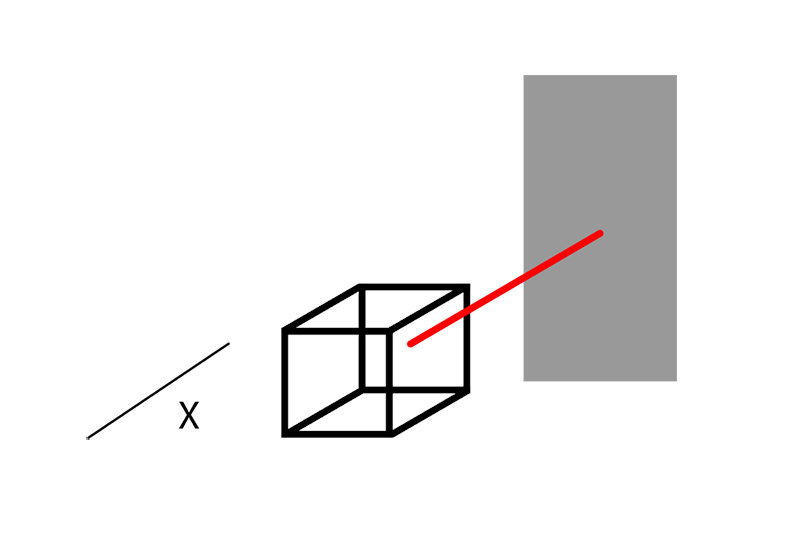
For a 1D laser scanner, we need a
still
laser beam that measures the distance between an obstacle and the scanner on one axe so one dimension.
For a 2D LiDAR only one laser beam is necessary. Indeed, it will pulse based on a spin movement and collect horizontal distance to the targets to get data on X and Y axes.
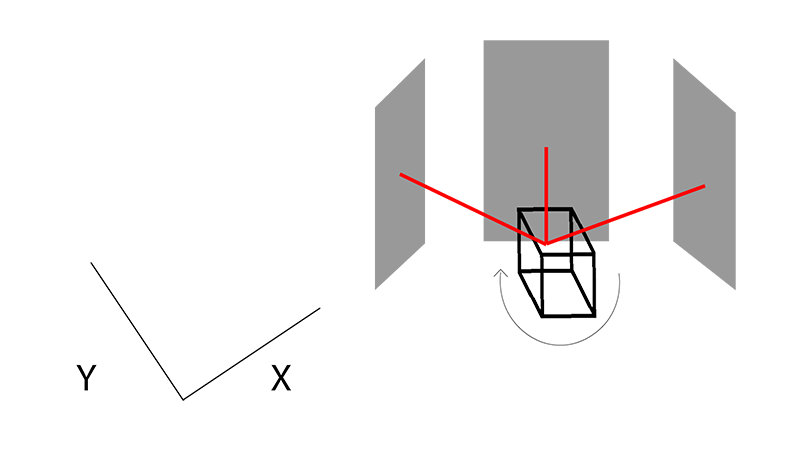
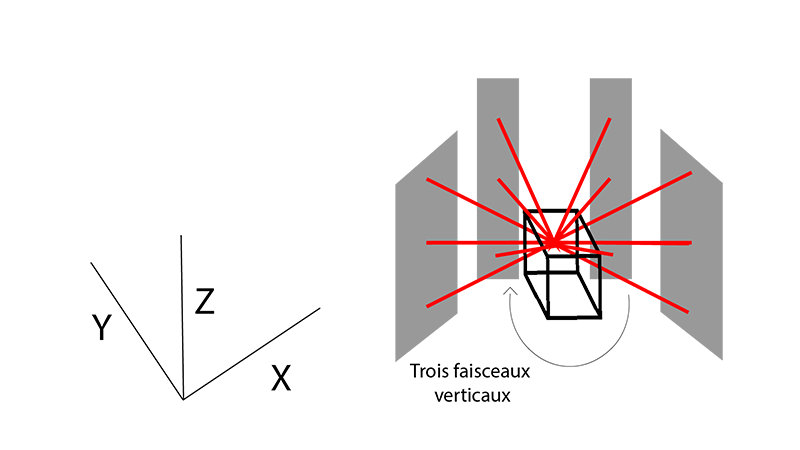
For a 3D LiDAR, the idea is the same, but several laser beams spread out on the vertical axe are shot to get data on X, Y and Z axes. Each laser beam will have an angle delta with the other beams.
Wavelength
The wavelength of the laser is an important parameter of the LiDAR. Indeed, the sunlight received on Earth’s surface is spread out over a wide wavelength spectrum:
img class=”size-full wp-image-5987″ src=”https://blog.generationrobots.com/wp-content/uploads/2019/08/what-is-a-lidar-part-1-4.jpg” alt=”Spectre des radiations solaires” width=”800″ height=”600″ /> Sun radiations spectrum
On this chart, a few drops can be noticed:
- 750 nm
- 940 nm
- 1125 nm
- 1400 nm
Laser beams more powerful than the level 1 can be harmful to the human eye and damage the retina.
LiDAR use the following wavelength:
- Infrared (1500 –2000 nm) for meteorology/Doppler LiDAR – Scientific uses
- Near-infrared (850 -940 nm) for terrestrial mapping
- Blue-red (500 –750 nm) for bathymetry
- Ultraviolet (250 nm) for meteorology
Indoor/Outdoor
All the LiDAR that comply to this technology standards can be used indoor. Only a few of them can be used outdoor. The following factors need to be taken into account:
- The wavelength: at 500 nm, the sunlight produces the highest level of disturbance
- The ambient light resistance (in Lux) : parameter which indicates how much light it can accept to work properly
- The surface type : transparent surface, smoke, fog, etc
- The environmental noise resistance ability: rain, snow, relief, etc
- The temperature range: operating temperature of the LiDAR
- Electromagnetic considerations: physics disturbance which can alter the sensor behaviour
Outdoor LiDAR are more expensive due to their higher performances.
Distance
LiDAR distance range go from 0.01m to 200m. Depending of the environment the LiDAR will be exposed to indoor, outdoor, rugged landscape, etc. A LiDAR with a suitable distance range needs to be picked.
Error
All LiDAR encounter two types of errors :
Systematic error : this type of error shifts all measurements in a systematic and predictable way. Systematic errors can’t be eliminated, but their influence can be minimized.
Statistical error: additional errors, due to the environment and physics parameters (refractions, diffraction, etc), can also occur. A statistical error happens when the exact same measurements done by the LiDAR will display different values.
LiDAR range distance error change between ±10mm to ±200mm.
Power supply
All LiDAR require a power supply of some sort. Depending of the voltage and the current consumption,, power consumption can be calculating. Using a battery, this parameter has a real importance, indeed, a LiDAR which is consuming a lot of power will shorten the battery cycle.
Performances
Angular range
This technical specification indicates the range of the lidar rotation.
This technical specification indicates the range of the LiDAR rotation.
For example: a LiDAR with an angular range of 360° can do a full rotation (a full circle) while it is operating. If this parameter is smaller than 360°, the LiDAR will measure only on a part of its surrounding (like a slice of pie).
For a mobile robot, it will require to map all his environment, so a 360° angular range LiDAR will be useful.
Steps
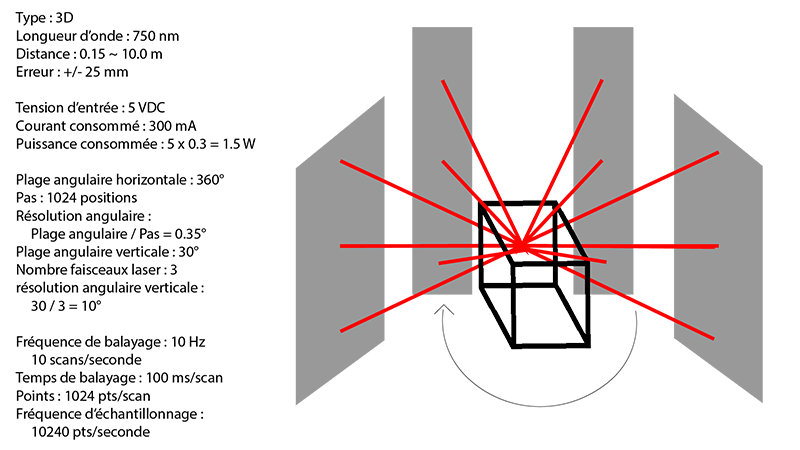
The angular resolution is the result from the previous calculation (0.35°), it indicates how accurate the LiDAR can be on its spinning range. The smaller this number is, the higher the quality of the generated ‘map’ will be. You should choose this parameter, knowing how accurate your environment need to be for your robot to move in.
Angular resolution
The angular resolution is the result from the previous calculation (0.35°), it indicates how accurate the lidar can be on its spinning range. The smaller this number is, the higher the quality of the generated ‘map’ will be. You should choose this parameter, knowing how accurate your environment need to be for your robot to move in.
Scanning frequency
This linear parameter indicates how fast the LiDAR motor rotates. The scanning frequency shows how many rotations the LiDAR is able to do in 1 second.
| Scanning frequency | Angular speed | Rotational speed |
| 1 Hz | 360°/second | 60 rpm (tr/min) |
For example: a LiDAR which has a 10 Hz scanning frequency and an angular range of 360° will do 10 rotations per second.
The choice of this parameter is essential when your robot is moving fast in his environment or when the environment is moving fast around the robot. Indeed, nobody likes to take a decision missing informations.
Scanning time
This parameter is : Scanning Time = 1Scanning frequency = x second/scan.
Samples
This is the number of points measured.
For example:1024 samples/scanmeans that a LiDAR with one laser beam will have 1024 points or samples in one scan cycle.
Samples frequency
This is the number of samples for one second.
For example: a LiDAR with one laser beam and 1024 steps at 10Hz has a sample frequency of1024 * 10 = 10240 samples/second.
You can improve one of the two settings to increase the amount of data received in one second.
Interface
The interface, controller and communication protocol that will be used with the LiDAR must be able to keep up with the data rate measurement (I2C, PWM, SPI, serial, etc), in order not to lose any information.
You need to be sure to have the same communication speed between your LiDAR and your board to process data accurately to get the expected behaviour for your robot.
ROS
The Robot Operating System (ROS) is a set of software libraries and tools design to help the creation of robot applications. From drivers to state-of-the-art algorithms, and with powerful developer tools, ROS is now an industry standard for any robotics project. It is an open-source solution.
The LiDAR featured on the Génération Robots website are all ROS compatible. Do not hesitate to browse our LiDAR selection or to contact us , if you need more information about this technology.
Conclusion – LiDAR pros and cons
LiDAR pros
- Data can be collected quickly and with high accuracy
- LiDAR can be integrated with other sensors : sonar, camera, IMU, GPS, ToF sensors
- The LiDAR technology can be used in daylight or in the dark, thanks to an active illumination sensor
- Can be used to collect data about unreachable places
- LiDAR are fast and highly accurate. It is a great tool to collect data about vast areas of land
- Once properly set up, a LiDAR is an autonomous piece of technology and can pretty much run by itself
LiDAR cons
- LiDAR can be expensive depending of the specifications required by the project
- LiDAR are ineffective in heavy rain, low hanging clouds, if your environment have a fog or smoke atmosphere or using transparent obstacles
- Analyzing the massive quantity of data collected can consume time and resources
- Powerful laser beams used in some LiDAR can damage the human eye
- Difficulties to penetrate highly dense matter
Read our other blog posts from our “LiDAR technology” serie
|
|
Do not hesitate to browse our LiDAR selection or to contact us if you need additional information or a quotation.
LiDAR distributed by Génération Robots

|
|
|
|
|
|
|