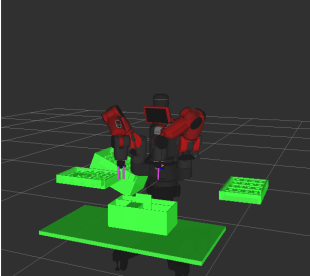
Baxter Tasker ist ein neues ROS-Pack, erstellt durch Generation Robots für den vielgerühmten Baxter Research Roboter von Rethink Robotics. Baxter Tasker bietet eine Schnittstelle zur Steuerung Ihres Computers und des Baxter Roboters. Sie soll das Pick & Place-Verhalten ermöglichen und generiert automatisch den Python-Code für diese Verhaltensweise. So können Sie dem Baxter Roboter einfache Verhaltensweisen beibringen und außerdem komplexere Verhaltensweisen selbst in Python schreiben.
Baxter Tasker: Unterstützt “Pick & Place” beim Baxter
Übersicht über Baxter Tasker
Ganz gleich, ob Sie ein Neueinsteiger oder bereits fortgeschritten in der Python-Entwicklung sind, das ROS-Pack wird Ihnen beim Start mit dem Baxter Roboter sehr nützlich sein. Es handelt sich um ein Mittel, um die Programmierung des Baxter im Handumdrehen zu erlernen.
Sie fragen sich sicher, wozu der Baxter Roboter fähig ist. Die Antwort finden Sie schnell in den in Python verfügbaren Klassen, welche die Sensordaten und Steuerelemente des Roboters anzeigen.
Über diese Schnittstelle erhalten Sie Zugriff auf folgende Elemente:
- Anzeige
- Tasten
- Kameras
- Arme
- Infrarot-Entfernungsmesser
- Leuchtdioden (LEDs)
- Ultraschallsensoren

Noch mehr Kontrolle über die Roboterhardware erhalten Sie durch die Erstellung von Klassen, bei denen neue Funktionen hinzugefügt werden können. Sie sind automatisch auf der grafischen Programmierumgebung zu sehen. Zudem stehen Prozesse für die Speicherung von Strecken und Umweltinformationen zur Verfügung.
{kind=link}
Baxter Tasker: Was brauche ich und welche Software ist dafür erforderlich?
Der Baxter Tasker wurde für Python 2.7 mit ROS Groovy und das SDK 0.7.0 von Baxter entwickelt. Wir empfehlen auch die Installation von MoveIt, einem Tool zur Erstellung einer virtuellen Szene rund um den Baxter im Hinblick auf eine kollisionsfreie Planung.
Zum Einstieg senden Sie uns einfach einen öffentlichen SSH-Schlüssel an baxter@humarobotics.com und laden den Baxter Tasker kostenlos von unserem Git-Server herunter: Git Clone git@www.humarobotics.com:baxter_tasker.
Folgende Roboter sind auf der Website von Generation Robots verfügbar: