Wir verkaufen Roboterarme an Forschungslabors, Universitäten sowie Forschungs- und Entwicklungseinheiten. In diesem Beitrag präsentieren wir Ihnen einen Vergleich zwischen vier Roboterarmen mit grossen Abmessungen, die über 6 oder 7 Freiheitsgrade verfügen und ROS-kompatibel sind.
Bei welchen Anwendungen in der Forschung kommen Roboterarme zum Einsatz?
In Forschungsinstituten oder Entwicklungs- und Forschungsabteilungen werden Roboterarme in verschiedenen Forschungsbereichen eingesetzt:
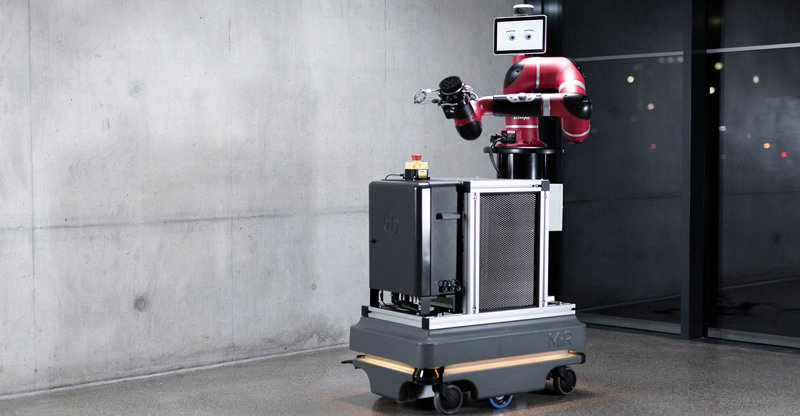
- Erkundung (terrestrisch oder räumlich), Analyse oder Überwachung, durch Anpassung eines Roboterarms auf eine mobile Basisstation
- eGesundheit, insbesondere Erforschung von intelligenten Prothesen (gedankengesteuerte Roboterarme)
- Assistenz für ältere oder behinderte Menschen, mit Programmierung von Roboterarmen zur Ausführung von alltäglichen Aufgaben (Kaffee kochen, Wäsche zusammenlegen usw.)
- Versuche zur Erprobung der Widerstandsfähigkeit verschiedener Produkte (Displays von Smartphones, intelligente Textilien usw.)
Roboterarme mit 6 oder 7 Freiheitsgraden
Eines der zu berücksichtigenden Hauptkriterien beim Kauf eines Roboterarms ist die Anzahl von Freiheitsgraden. Der Freiheitsgrad steht für die Fähigkeit eines Systems, sich entlang einer Translations- oder Rotationsachse zu bewegen.
Ein Roboterarm mit 6 Achsen kann einen beliebigen Punkt mit einer beliebigen vorgegebenen Orientierung im Raum erreichen. Dadurch kann solch ein Roboter für zahlreiche Aufgaben optimal eingesetzt werden. Zum Beispiel:
- Ein Werkzeug von unten greifen, umdrehen und wieder absetzen;
- Eine Schublade öffnen, einen Gegenstand herausnehmen und die Schublade wieder schliessen;
- Auf einem Schreibtisch oder an eine Wand schreiben.
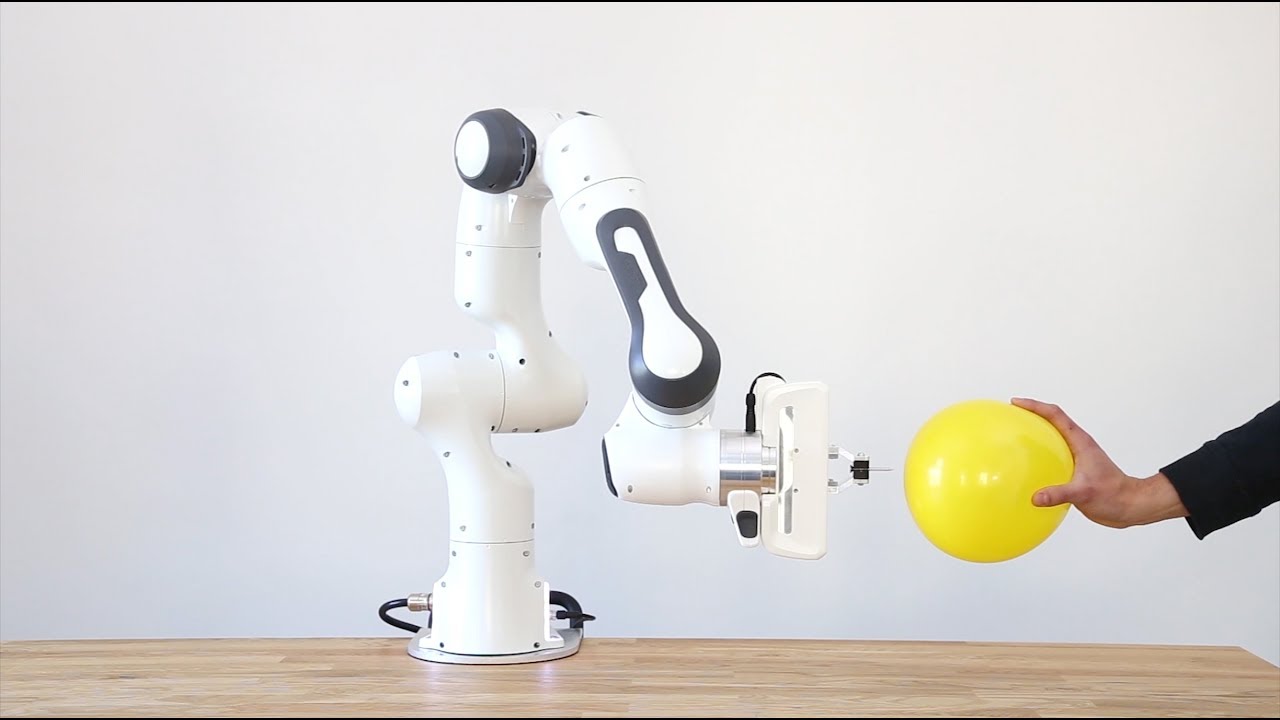
Ein Roboterarm mit 7 Freiheitsgraden (DoF) ist einem menschlichen Arm am nächsten. Er ist beweglicher und schneller als ein Arm mit 6 DoF und kann somit auf abgeschottete und verschlossene Bereiche zugreifen, die für einen Roboter mit 6 Freiheitsgraden nicht immer zugänglich sind.
Kraft und Reichweite
Die Kraft (maximale Tragfähigkeit) und die Verlängerung des Arms (maximale Reichweite) sind zwei weitere wichtige Kriterien, die berücksichtigt werden sollten Muss der Roboterarm bei dem Projekt, an dem Sie gerade arbeiten, schwere Gegenstände tragen oder eine bestimmte Kraft auf einen beliebigen Mechanismus ausüben?
Vorsicht, je höher die Tragfähigkeit eines Roboterarms ist, desto geringer ist seine Genauigkeit. Die Verlängerung entspricht dem Aktionsradius des Arms, dem Abstand zwischen Basis und Ende des Arms, wenn dieser ausgestreckt wird
Geschwindigkeit und Genauigkeit
Diese Parameter sind ebenfalls wichtig, wenn der Roboterarm beispielsweise kleine Objekte handhaben muss (oder wenn natürlich die Geschwindigkeit ein ausschlaggebender Faktor bei der Anwendung ist, an der Sie gerade arbeiten). Somit kann die Wiederholgenauigkeit des Roboters (mittlerer Fehler, wenn der Roboterarm öfter an denselben Punkt zurückkehrt) bei Pick&Place Anwendungen in einem Forschungslabor von besonderer Bedeutung sein.
Wenn der Roboter aber nur im Rahmen eines experimentellen Projekts zur Heimpflege und -betreuung benötigt wird, gehört eine hohe maximale Geschwindigkeit sicherlich nicht zu den ausschlaggebenden Kriterien beim Kauf eines Roboterarms.

Weitere entscheidende Kriterien beim Kauf eines Roboterarms
Wir haben unsere „Checkliste“ um fünf weitere Faktoren erweitert, die zu berücksichtigen sind:
- Anzahl der auf dem Markt verfügbaren Greifer
- ROS-Kompatibilität des Roboterarms
- Roboter ist kollaborativ oder nicht (Mensch-Roboter-Interaktion und Möglichkeit der sicheren Arbeit in näherer Umgebung des Roboters)
- Schutzart (gegen Feuchtigkeit, Staub, Stösse)
- CE-Kennzeichnung (Konformität des Roboters mit der EU-Gesetzgebung)
- Preisaufwand
Vergleichende Tabelle unserer vier kollaborativen Roboter
Nachstehend folgt eine vergleichende Tabelle unserer vier Rotoberarme mit grossen Abmessungen unter Bezugnahme auf die in diesem Beitrag aufgeführten Kriterien.
|
|
|
 |
 |
|
|
| |
| Gen3 | Gen3 Lite | M1013 | Sawyer | Baxter (Doppelarm-roboter) | xArm | |
| Freiheits-grade | 6 DoF oder 7 DoF | 6 DoF | 6 DoF | 7 DoF | 7 DoF | 5, 6 oder 7 DoF |
| Maximale Tragfähigkeit | 4 kg | 0.5 kg | 10 kg | 4 kg | 2.2 kg | 3 kg |
| Maximale Reichweite | 891 mm (6DoF) und 902 mm (7 DoF) |
760 mm | 1300 mm | 1260 mm | 1210 mm | 700 mm |
| Wiederhol-genauigkeit | ± 0.15 mm | ± 0.15 mm | ± 0,1 mm | ± 0,1 mm | ± 0.2 mm | ± 0.1 mm |
| Geschwindig-keit | 50 cm/s | 25 cm/s | 1m/s | 1.5 m/s | 1m/s | 1m/s |
| Verfügbare Greifer | 1 | 1 | ± 20 | ± 10 | ± 10 | 3 |
| ROS-Kompa-tibilität | Ja | Ja | Ja | Ja | Ja | Ja |
| Kollabora-tiver Roboter | Ja | Ja | Ja | Ja | Ja | Ja |
| IP-Schutzart | IP33 | IP22 | IP54 | IP54 | IP50 | IP22 |
| CE-Kennzeich-nung | Ja | Ja | Ja | Ja | Nein | Nein |
| Preisaufwand | 29 500,00€ brutto(6DoF) 35 000,00€ brutto(7DoF) |
18 000,00€ brutto | 38 400,00 € brutto | 42 000,00 € brutto | 43 200,00 € brutto | 6 600,00€ brutto (5DoF) 9 600,00€ brutto (6DoF) 11 400,00€ brutto (7DoF) |