
Um den Baxter noch kooperativer zu machen, haben unsere
GR Lab Teams
beschlossen, den Roboter mit dem berühmtesten aller Tiefensensoren auszustatten: der
Kamera Kinect. Nichts ist natürlicher für einen kooperativen Roboter als direkt mit einem Anwender zu kommunizieren, wenn dieser in seinem Umfeld erkannt wird. Daraus entstand die Idee, einen motorisierten Zubehörteil hinzuzufügen.


Warum eine Kinect Kamera, und warum auf dem Kopf?
Mit der Kinect und dem ROS Openni Tracker Paket ( http://wiki.ros.org/openni_tracker ) werden potenzielle Benutzer in der Umgebung erkannt. Dabei stellte sich die Frage der Position und Befestigungsart der Kinect Kamera. Das Hauptkriterium bei der Kamerapositionierung ist der Blickwinkel. Denn die Kamera sollte in der Lage sein, ihre Umgebung zu beobachten, ohne von den Bewegungen des des Baxter Roboters beeinträchtigt zu werden.
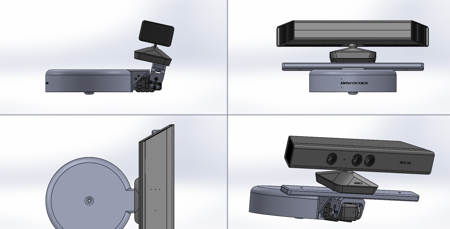
Daher war der bestmögliche Anbringungsort der Kinect der Kopf. Helms des kooperativen Roboters Baxter wurde ein neuer Helm entwickelt und per 3D-Druck hergestellt. Dieser ist mit der Microsoft Kinect Kamera v1 kompatibel, aber auch mit der Kinect für Windows 8 (V2).

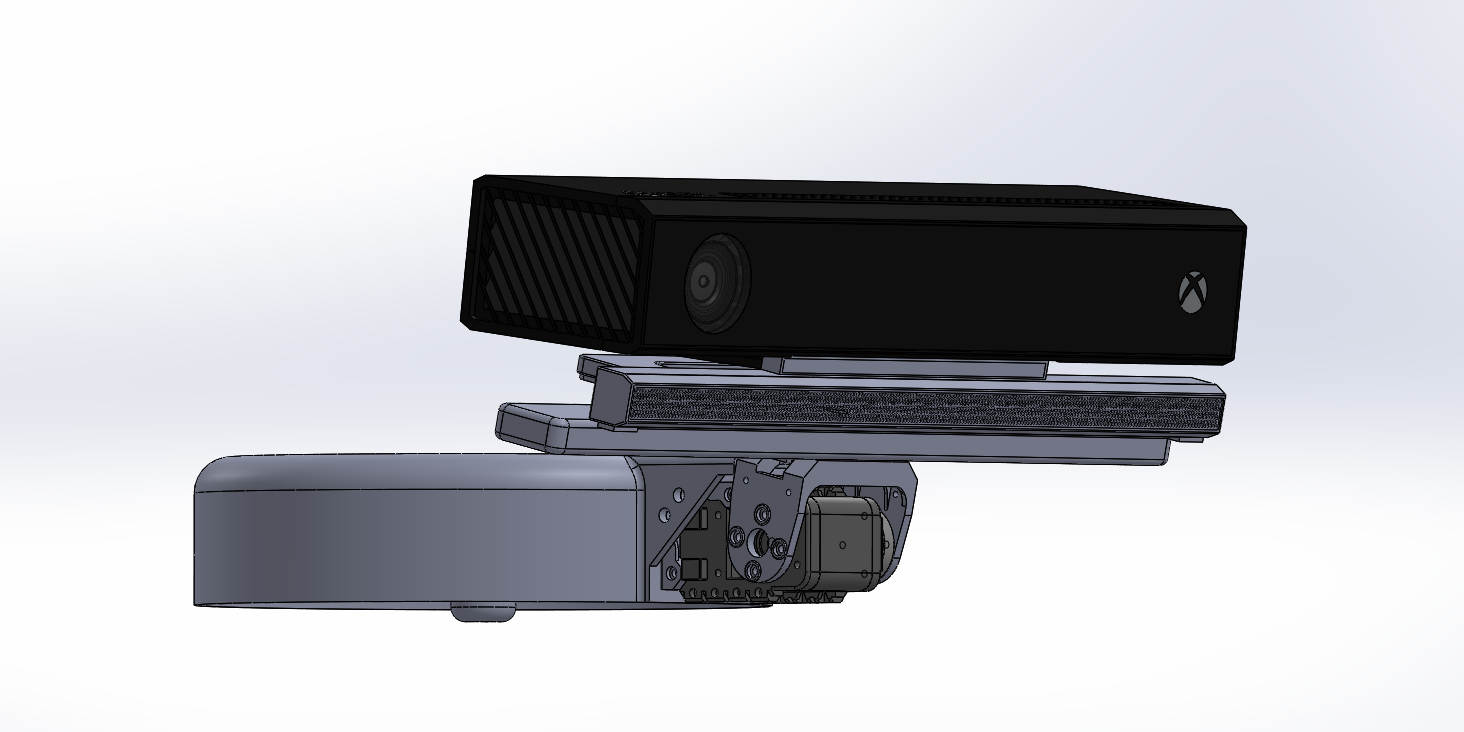
Überlegung zur Steuerung des Neigungswinkels der Kinect Kamera
Um die Mensch-Roboter-Interaktion effizienter zu gestalten, haben unsere Ingenieurteams beschlossen, den Neigungswinkel der Kinect Kamera zu steuern. Denn hat der Baxter einmal einen potenziellen Nutzer erkannt, so darf die Kamera ihn nicht mehr aus den Augen lassen, um die Mensch-Roboter-Interaktion durchgängig zu ermöglichen.
Die Steuerung des Neigungswinkels der Kinect erfolgt mithilfe eines Servomotors Dynamixel AX-18A , der auf dem neuen “Helm” des Baxter angebracht wurde.
Unsere ROS-kompatible Python Dynamixel Library wurde hier dazu verwendet, um die Neigung der Kinect an die Körpergröße des Nutzers anzupassen.

Die STL-Dateien stehen zum Download bereit, wenn Sie versuchen wollen, selbst den Helm per 3D-Druck herzustellen:
Wenn es Ihnen an einem 3D-Drucker oder anderen Teilen fehlt, finden Sie alles Notwendige auf unserer Website, um Ihren eigenen “Helm” für den Roboter Baxter zu bauen!