
Wir haben verschiedene Tests in Innen- und Aussenumgebung mit dem LiDAR RS-LiDAR16 von Robosense durchgeführt. Anschliessend haben wir die Ergebnisse mit den anderen LiDAR (Quanergy M8-1, Sick 551 und RpLiDAR A3) unter denselben Bedingungen verglichen. Die Distanzmessung bei einem LiDAR kann von mehreren Faktoren sowie internen (Hardware-Komponenten, mathematische Berechnungen, Kommunikationsprotokollen usw.) oder externen Parametern (Sonnenlicht, Temperatur, Feuchtigkeit, Reichweite der Umgebung, Materialien und Einfallswinkel, Hindernissen usw.) beeinflusst werden. Um zu verstehen, wie sich diese Parameter auf die Genauigkeit der Distanzmessung auswirken, haben wir verschiedene Umgebungen betrachtet und analysiert. Hier nun eine Liste der verschiedenen Hypothesen zu den LiDAR-Systemen:
| Hypothese | Getestet | Details |
| Hindernis-Materialien | Ja | Zehn unterschiedliche Materialien |
| Sonnenlicht | Ja | Vier Umgebungsbedingungen (Dunkelheit, künstliche Beleuchtung, Schatten und Sonnenlicht) |
| Abweichung in Abhängigkeit von der Zeit | Ja | Zwei Umgebungsbedingungen mit jeweils 45-minütigem Test |
| Temperatur | Ja | Zwei Umgebungsbedingungen: Schatten und Sonnenlicht |
| Feuchtigkeit | Nein | |
| Einfallswinkel | Nein | |
| Hardware-Komponenten | Nein | Tests mit denselben LiDAR |
| Kommunikationsprotokolle | Nein | Ethernet und USB je nach Spezifikationen |
| Mathematische Berechnungen | Nein | Lesen des Bruttowerts der Punktwolke/Laserabtastung |
| Unterschiede zwischen Lichtbündeln | Ja | Mit vertikalen Hindernissen |
| Einfluss Tastfrequenz | Ja | Bei 5, 10 und 20 Hz |
| Unterschiede zwischen kurzen/langen Distanzen | Ja | 6 unterschiedliche Distanzen |
| Unterschiede zwischen zwei Winkelbereichen | Ja | Phase bei 0° und +90°, +180° und +270° |
| Hindernis mit/ohne Unterbrechungen | Beobachtet | Zusätzliche Umgebungsbedingungen, die jedoch nicht auf denselben Prozess bezogen wurden |
| Kreisförmige/senkrechte Formen | Beobachtet | Zusätzliche Umgebungsbedingungen, die jedoch nicht auf denselben Prozess bezogen wurden |
Es handelt sich hierbei um eine sehr komplette Testreihe, bei der wir versucht haben, die verschiedenen Hypothesen abzudecken. Die Ergebnisse können von der bisher untersuchten hohen Wiederholgenauigkeit abweichen, vermitteln jedoch eine gute Vorstellung der Leistungen des RS-LiDAR16. Bei mehreren Versuchen wurde eine höhere Fehlerrate (zwischen 0 und 4 cm) beim RS-LiDAR16 gegenüber den anderen LiDAR nachgewiesen. Es ist jedoch darauf hinzuweisen, dass der LiDAR von RoboSense über 16 Laserbündel verfügt und somit bei kartographischen Anwendungen aufgrund der Roboterbewegung diese Fehler durch aufeinanderfolgende Iterationen ausgleichen kann.
3D-LiDAR: Echtzeit, grosse Reichweite und hohe Genauigkeit
Heute sind die LiDAR und insbesondere die 3D-LiDAR-Systeme im Bereich der neuen Technologien, wie mobile Robotik und autonome Navigation, weit verbreitet. In der Tat werden sie insbesondere zum Treffen von Entscheidungen für die Navigation benötigt. Dank der letzten technologischen Verbesserungen können alle Details einer Umgebung, eines Segments oder eines Hindernisbündels erfasst werden. Mehrere Unternehmen entwickeln ihre eigenen Komponenten und Software-Anwendungen für die Kartographie. Sie liefern 3D-Informationen über ihre Umgebung in Echtzeit, ohne jeglichen Kontakt, mit grosser Reichweite und hoher Messgenauigkeit. Es gibt zwei Methoden (direkt und indirekt) der Flugzeittechnologie[2]:
- Die direkte Methode beruht auf der Messung des Zeitintervalls zwischen einem gesendeten und einem erfassten Signal.
- Die indirekte Methode beruht auf der Ermittlung der Distanz durch eine Phasenverschiebung eines mit einem sinusförmigen Signal oder einem gepulsten Signal modulierten Lichtstrahls.
Die Anwendungen erfordern höchste Genauigkeit, wobei Distanzbereich, Auflösung und Genauigkeit des Sensors die wichtigsten Fokusparameter sind.
Vorstellung von Lidar RS-LiDAR16
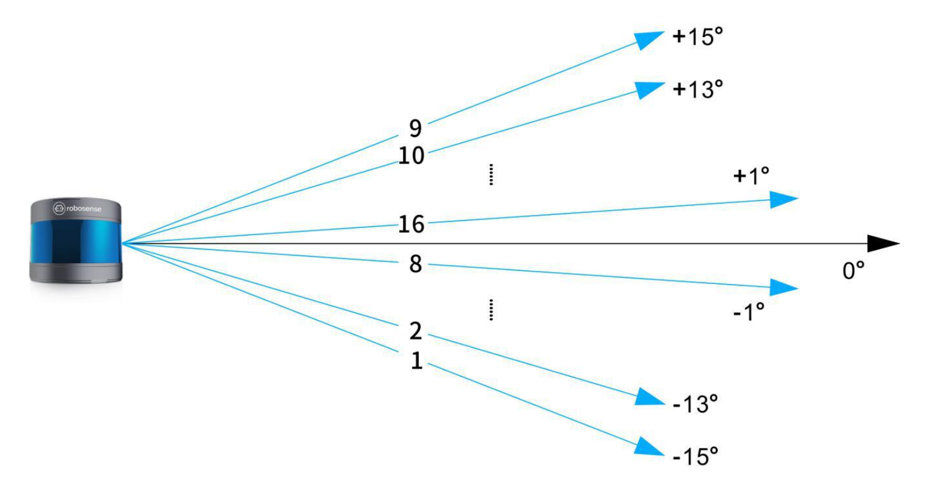
Der RoboSense RS-LiDAR16 ist ein attraktives und kostengünstigeres 3D-LIDAR-Modell als seine Konkurrenzprodukte. Er bietet gute technische Spezifikationen zu einem Bruttopreis von 4 128,00 €. Der RS-LiDAR16 besitzt 16 Laserbündel. Das System umfasst 16 lineare 2D-Scanner, die mit einer anwählbaren Frequenz zwischen 5 Hz und 20 Hz betrieben werden können. Die 16 Lichtbündel verteilen sich auf ein vertikales Sichtfeld (FOV) von 30° und das gesamte System ist in einem Winkelbereich von 360° drehbar. Im Folgenden werden die technischen Daten des Robosense RS-LiDAR16 aufgeführt:
- ROS-kompatibel
- Laserbündel: 16
- Wellenlänge: 905 nm
- Laserklasse: 1
- Genauigkeit: ± 2 cm
- Messbereich: 20 cm bis 150 m (20 % Remission)
- Datenrate: 320 000 Pkt/s
- Sichtfeld (vertikal): +15° bis -15° (30°)
- Winkelauflösung (vertikal): 2°
- Sichtfeld (horizontal): 360°
- Winkelauflösung (horizontal/Azimut-Achse): 0,09° bis 0,36° (5-20 Hz)
- Drehgeschwindigkeit: 300 bis 1200 U/min (5-20 Hz)
- Versorgungsspannung: 9-32 VCC
- Verbrauch: 9 W
- Schutzart: IP67
- Betriebstemperatur: -10 bis 60 °C
- Datentyp: Raumkoordinaten/Signalstärke
- Abmessungen: 82,7 mm (H) x 109 mm (φ)
- Gewicht: 840 g (ohne Kabel)
Um den Sensor nutzen zu können, stellt RoboSense eine Software zum Einlesen der Werte in Windows und Ubuntu sowie ein Software Development Kit (SDK) zur Verwendung des LiDAR mit einem ROS zur Verfügung.
Charakterisierung des Robosense LiDAR mit 16 Lichtbündeln
Wie in der ersten Tabelle angegeben, können die Messfehler auf verschiedene Faktoren zurückzuführen sein. In diesem Abschnitt versuchen wir, die Messfehler aufgrund von Systementwicklung und Umgebung zu bewerten. Bei der Nachbearbeitung konzentrieren wir uns hauptsächlich auf die Kernbündel (8 & 16):
1. Einfluss von Hindernismaterialien
Die Leistungen der LiDAR fallen je nach Material des Hindernisses unterschiedlich aus. Um diese Unterschiede zu quantifizieren, haben wir ein statisches Szenario aufgebaut, bei dem der RS-LiDAR16 in einem Abstand von ca. 2 m ± 0,01 m vor einem Hindernis aus unterschiedlichem Material positioniert wird. Für jedes Material wird der LiDAR in einem Innenraum während einer Dauer von 3 Minuten laufen gelassen, nachdem er mindestens 2 Minuten lang nicht genutzt wurde. Eine BAG-Datei von 30 Sekunden wird aufgenommen, um die Daten nachverarbeiten zu können. Zehn Materialien werden getestet: Fenster, TV-Monitor (Glas), weisse Tafel, Tür, Schaum, Transportkunststoff, Pappkarton, Metall, Wand, Holzspanplatten.
2. Einfluss von Sonnenlicht
Einige LiDAR funktionieren im Freien nicht korrekt, da sie vom Sonnenlicht beeinflusst werden. Sonnenstrahlung wird nämlich in einem grossen Wellenlängenbereich ausgesendet und verändert somit die Messwerte der LiDAR. In einem statischen Szenario wird der RS-LiDAR16 in einem Abstand von ca. 2 m ± 0,01 m vor einer ebenen Wand ( Holzspanplatten ) positioniert. In jeder Umgebung wird der LiDAR während einer Dauer von 3 Minuten laufen gelassen, nachdem er mindestens 2 Minuten lang nicht genutzt wurde. Eine BAG-Datei von 30 Sekunden wird aufgenommen, um die Daten nachverarbeiten zu können. Vier Umgebungen werden getestet: Innenraum bei absoluter Dunkelheit, Innenraum mit künstlicher Beleuchtung, Aussenumgebung im Schatten und Aussenumgebung im Sonnenlicht.
3. Einfluss von Einsatzzeit und Temperatur
Bestimmte Bauteile weisen nach verlängertem Einsatz und insbesondere bei erhöhten Temperaturen eine geringere Genauigkeit auf. In einem statischen Szenario wird der RS-LiDAR16 in einem Abstand von ca. 2 m ± 0,01 m vor einer ebenen Wand ( Holzspanplatten ) positioniert. In jeder Umgebung wird der LiDAR für eine Dauer von 45 Minuten laufen gelassen, nachdem er mindestens 10 Minuten lang nicht genutzt wurde. Alle 10 Minuten wird eine BAG-Datei von 1 Minute aufgenommen, um die Daten nachverarbeiten zu können. Zwei Umgebungen werden getestet: Aussenumgebung im Schatten (Umgebungstemperatur ~ 25 °C) und in der Sonne (Kontakttemperatur ~ 32 °C).
4. Unterschiede zwischen Lichtbündeln & Einfluss von Tastfrequenz & Unterschiede zwischen kurzen/langen Distanzen
Die 3D-LiDAR-Systeme müssen das physikalische Verhalten der Lichtwellen berücksichtigen. Je nach Winkelabstand zwischen den vertikalen Lichtbündeln werden mit dem Laser unterschiedliche Ergebnisse erzielt. Bei einer Tastfrequenz von 20 Hz läuft der LiDAR-Motor doppelt so schnell wie bei 10 Hz. Dabei ist interessant, zu untersuchen, ob die Ergebnisse dadurch beeinflusst werden. Die LiDAR-Systeme mit grosser Reichweite sind auf kurze Entfernungen nicht wirklich effizient. Nun sollen die unterschiedlichen Messfehler quantifiziert werden. Erstes Szenario: In einem statischen Szenario werden RS-LiDAR16, Quanergy M8, RPLIDAR A3 und Sick 551 vor einer ebenen Wand ( Pappkarton ), in einem Abstand von ca. 1,01 m und 1,90 m ± 0,01 m positioniert. In jeder Umgebung wird der LiDAR für eine Dauer von 3 Minuten laufen gelassen, nachdem er mindestens 2 Minuten lang nicht genutzt wurde. Eine BAG-Datei von 15 Sekunden wird aufgenommen, um die Daten nachverarbeiten zu können. Zweites Szenario: In einem statischen Szenario werden RS-LiDAR16 und Quanergy M8 vor einer ebenen Wand ( Holzspanplatten )in einem Abstand von ca. 5,00 m, 9,98 m, 19,97 m und 27,81 m ± 0,01 m positioniert. In jeder Umgebung wird der LiDAR für eine Dauer von 3 Minuten laufen gelassen, nachdem er mindestens 2 Minuten lang nicht genutzt wurde. Eine BAG-Datei von 30 Sekunden wird aufgenommen, um die Daten nachverarbeiten zu können.
5. Unterschiede zwischen den Winkelmessbereichen des LiDAR-Systems
Der LiDAR kann in einem Teil des Winkelbereichs verringerte Leistungen aufweisen. Der LiDAR kann in einem Teil des Winkelbereichs verringerte Leistungen aufweisen. In einem statischen Szenario wird der RS-LiDAR16 vor einer ebenen Wand ( Pappkarton ) in einem Abstand von 1,01 m ± 0,01 m positioniert. In jeder Umgebung wird der LiDAR für eine Dauer von 3 Minuten laufen gelassen, nachdem er mindestens 2 Minuten lang nicht genutzt wurde. Eine BAG-Datei von 15 Sekunden wird aufgenommen, um die Daten nachverarbeiten zu können. Vier Umgebungen werden getestet : Die Umgebung bleibt unverändert, der LiDAR dreht sich um 90° zwischen den beiden Aufnahmen (+180° und +270°).
Details zum Algorithmus
Ein einfacher Algorithmus wird verwendet. Der RS-LiDAR16 liest die Rohdaten über das Topic des LiDAR und überträgt somit Meldungen des Typs Pointcloud2 bei LiDAR RS-LiDAR16, Quanergy M8 und Sick oder des Typs Laserscan bei RpLiDAR. Bei diesen Versuchen werden lediglich die Daten der X- und Y-Achse berechnet, um einen Mittelwert, die Reichweite, die Standardabweichung und die Varianz der BAG-Daten zu erhalten. Wir befinden uns in einem begrenzten Bereich (X +/- 0,1 m und Y +/- 0,5 m), wobei X und Y den bekannten Koordinaten des Hindernisses entsprechen. Wir ermitteln für alle Daten, wie viele Werte vom LiDAR erfasst werden, um das erzielte Ergebnis in das richtige Verhältnis zu setzen. Wir berechnen die Werte der gesamten BAG-Datei, da die Umgebung unverändert bleibt, um genauere Ergebnisse zu erzielen.
Versuchsergebnisse
Da Ihnen jetzt die Versuchsbedingungen von Abschnitt III bekannt sind, kommen wir zur Diskussion und Auslegung der Ergebnisse dieser Versuche. Beachten Sie bitte, dass alle Ergebnisse in diesem Dokument verfügbar sind.
1. Einfluss von Hindernismaterialien
Der RS-LiDAR16 zeigt gute Ergebnisse (± 1 cm) bei TV-Monitor, weisser Tafel, Tür und Schaum, weist jedoch relativ gestreute Daten mit einer Standardabweichung von ±2 cm auf. Im Falle des Fensters als Hindernis werden lediglich 4 Werte erfasst, da transparente Hindernisse am schwierigsten von einem LiDAR zu messen sind. Überraschend ist jedoch, dass bei Pappkarton, Wand, Holzspanplatten und Eisen weniger gute Ergebnisse mit einer Genauigkeit von +4 cm und +7 cm bei einer geringen Standardabweichung (± 1,5 cm) erhalten werden. Dieser Versuch zeigt, dass zwischen den verschiedenen Materialien grosse und unerwartete Unterschiede auftreten können. Um sicherzugehen, müssten neue Versuche für die Materialien durchgeführt werden, bei denen die ungünstigsten Ergebnisse erhalten wurden. Bei den anderen Versuchen sollte die Bedeutung des ausgewählten Materials berücksichtigt werden.
2. Einfluss von Sonnenlicht
Dieser Versuch wurde für ein Hindernis aus Holzspanplatten durchgeführt. Dabei wurden mit dem RS-LiDAR16 sowohl in einem Innenraum (-3 cm) als auch in einer Aussenumgebung (+5 cm im Schatten und +7 cm im Sonnenlicht) offenbar bessere Ergebnisse erzielt. Für dasselbe Material sind relativ grosse Unterschiede zwischen den verschiedenen Umgebungen zu beobachten.
3. Einfluss von Einsatzzeit und Temperatur
Dieser Versuch wird mit einem Hindernis aus Holzspanplatten im Schatten durchgeführt. Der RS-LiDAR16 scheint keinen Zeitdrift aufzuweisen, seine Genauigkeit nimmt im Laufe der Zeit sogar zu. Bei den ersten Messungen werden nämlich grössere Messfehler nachgewiesen (+5 cm bis 0 min gegenüber +1 cm bis 45 min für das Lichtbündel 8). Im Sonnenlicht werden die Lichtbündel 6 & 7 untersucht, da es zu einem Offset auf horizontaler Ebene kommt (d. h. sie entsprechen den Lichtbündeln 8 & 16 des vorherigen Szenarios). Das Verhalten ist unverändert, aber der Messfehler weist eine Konvergenz um +5 cm auf. Dies kann sich durch den Einfluss der Temperatur ergeben. Der LiDAR fühlte sich nämlich wärmer als im Schatten an. Sowohl im Schatten als auch in der Sonne sind bei den Lichtbündeln 16 & 7 höhere Messfehler zu beobachten (+3 cm und +2 cm).
4. Unterschiede zwischen Lichtbündeln & Einfluss von Tastfrequenz & Unterschiede zwischen kurzen/langen Distanzen
Die 2D-LiDAR weisen im Innenraum auf kurze Distanzen (1,01 m) bessere Ergebnisse (rpLiDAR: 0 cm und Sick: +1 cm) aufgrund ihres absolut horizontalen Lichtbündels auf. Bei den 3D-LiDAR besitzen die Lichtbündel im Durchschnitt einen Messfehler von +0 cm für Quanergy und von +3 cm, mit einer geringeren Standardabweichung, für RS-LiDAR16. In einem Abstand von 1,90 m zeigen die 2D-Sensoren immer noch gute Ergebnisse (rpLiDAR: 0 cm und Sick: +2 cm). Die Lichtbündel der 3D-LiDAR Quanergy und RS-LiDAR16 besitzen im Durchschnitt einen Messfehler von +1 cm. In einer Aussenumgebung wird eine höhere Genauigkeit bei einer Frequenz von 10 Hz erreicht (Fehler von -1 cm gegenüber 20 Hz). Beachten Sie bitte, dass eine Tastfrequenz von 5 Hz für die mobilen Roboter gefährlich ist, da sie sich nicht schnell genug auf eine neue Umgebung einstellen können. In einem Abstand von 5,00 m wird mit den Kernbündeln eine bessere Genauigkeit erzielt. Bei den Bündeln (8 & 16) weist RS-LiDAR16 einen Messfehler von +1 cm mit einer Standardabweichung von +2 cm auf. In einem Abstand von 9,98 m besitzt Quanergy eine höhere Genauigkeit mit einem Messfehler von lediglich +1 cm in beiden Frequenzbereichen und RS-LiDAR16 einen Messfehler von +3 cm bei 10 Hz sowie +5 cm bei 20 Hz. In einem Abstand von 19,97 m besitzen beide Modelle einen Messfehler von +3 cm. Und in einem Abstand von 27,81 m verfügen beide Systeme über eine gute Genauigkeit mit +1 cm für RS-LiDAR und +2 cm für Quanergy. Aufgrund seiner Auflösung weist der RS-LiDAR16 in dieser Entfernung bei einem so kleinen Hindernis (1,20 m x 0,8 m) nur wenige Werte auf. Bei 20 Hz wird kein einziger Punkt erfasst.
5. Unterschiede zwischen den Winkelmessbereichen des LiDAR-Systems
Es werden relativ ähnliche Ergebnisse mit einigen kleineren Differenzen (± 1 cm Messfehler und ± 0,5 cm Standardabweichung) erzielt. Die Versuchsbedingungen lassen keine Rückschlüsse auf ein typisches Verhalten zu. Der Versuch muss für verschiedene Umgebungen öfter wiederholt werden. Festzuhalten ist, dass bei den Versuchen offenbar unbeständige Messwerte, willkürliche und unsystematische Messfehler beobachten werden.
6. Schlussbemerkungen zu dieser experimentellen Studie
Ziel dieses Artikels war es, die Leistungen des Sensors RS-LiDAR16 in einer Reihe von Versuchen zu bewerten. Dieser LiDAR-Sensor ist neu auf dem Markt. Unsere Studie war für die Auswertung der erzielten Messungen ausgelegt, um festzustellen, ob ein Einsatz des Roboters in den Anwendungsbereichen des Herstellers möglich ist. Die Versuche hätten wiederholt werden müssen, um mehr Stichproben in unterschiedlichen Umgebungen (bei anderen Hindernisformen und Distanzen) zu erhalten. Diese Studie verschafft dennoch einen guten Überblick über die Leistungen von RoboSense RS-LiDAR16. Bei mehreren Versuchen wurde für RS-LiDAR16 im Vergleich zu den anderen LiDAR allgemein ein grösserer Messfehler nachgewiesen. Bei den 2D-LiDAR-Systemen scheint es offensichtlich, dass aufgrund der Anzahl von Lichtbündeln eine höhere Genauigkeit erzielt wird. Im Vergleich zu Quanergy M8-1 soll darauf hingewiesen werden, dass das RoboSense-Modell 16 Lichtbündel besitzt und somit bei kartographischen Anwendungen aufgrund der Roboterbewegung diese Fehler durch aufeinanderfolgende Iterationen ausgleichen kann. Wichtig ist festzuhalten, dass der verwendete Sensor zu einem der ersten Liefermodelle gehört. Wir hoffen, dass bei den folgenden Modellen diese Fehler korrigiert werden. Folglich kann die Einführung dieses Sensors als Beginn einer breiteren Vermarktung derartiger Sensoren betrachtet werden. Abschliessend soll darauf aufmerksam gemacht werden, dass es sich hierbei um unseren ersten wahren Versuch handelt. Wir haben versucht, verschiedene Hypothesen abzudecken, wobei die Ergebnisse eventuell nicht mit den bereits erzielten Leistungen hinsichtlich Wiederholgenauigkeit übereinstimmen, jedoch einen guten Überblick über die Leistungen von RS-LiDAR16 verschaffen.
Anhang und Literaturhinweise zur Studie
Ziel dieses Beitrags ist es nicht, als Forschungsstudie anerkannt zu werden. Die Studie basiert auf der Bewertung von Quanergy M8[1]. [1] Mittet, A., NJara, H., Roynard, X., Goulette, F. and Deschaud, J-E. “EXPERIMENTAL ASSESSMENT OF THE QUANERGY M8 LIDAR SENSOR”, The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLI-B5, 2016 XXIII ISPRS Congress, 12–19 July 2016, Prague, Czech Republic [2] Kilpela, A., Pennala, R. and Kostamovaara, J. “Precise pulsed time-of-flight laser range finder for industrial distance measurements”, Review of Scientific Instruments72(4), pp. 2197–2202, 2001.
Lesen Sie in unserer Rubrik LiDAR für Forschung und Innovation nach oder kontaktieren Sie uns für nähere Informationen oder einen Kostenvoranschlag.
Die LiDAR-Marken werden von Génération Robots vertrieben.

|
|
|
|
|
|
|